Compact Encoding of Robot-Generated 3D Maps for Efficient Wireless Transmission
Michael Kaess, Dr. Ronald C. Arkin, and Dr. Jarek Rossignac
 Mobile robots can be used to create 3D models of indoor
environments. Different sensors like stereo vision or laser range
finders are available for that task. This work searches for a way to
compress data from a range finder in real-time on board the robot
allowing for incremental transmission to a host in short bursts, where
it then can be optimized for visualization.
Mobile robots can be used to create 3D models of indoor
environments. Different sensors like stereo vision or laser range
finders are available for that task. This work searches for a way to
compress data from a range finder in real-time on board the robot
allowing for incremental transmission to a host in short bursts, where
it then can be optimized for visualization.
The data for this work is acquired by a SICK LS200 laser scanner which
is mounted on top of a Nomad 150 robot. The laser scanner scans 180°
in a plane perpendicular to the movement of the robot from one side
over the top to the other side. Each half a degree the distance to the
nearest object within 8 meters is measured with a resolution of 1 mm
and noise of typically several mm.
The robot moves with about 0.25 m/s while 5 complete scans per second
are performed. The resulting data is transformed to 3D coordinates and
displayed using OpenGL. Free navigation through the model in all
directions is possible.
Since the laser scanner is mounted on top of the robot it cannot see
obstacles below that height. For a more realistic view the first and
last measurements of each scan are projected down to the floor.
Additionaly the checkerboard on the floor makes keeping track of
distances easier (gridsize 0.5 m).
For efficient wireless transmission of the data, several compression
algorithms were tested on real data. These were the standard
compression programs Unix Compress, gzip, bzip2; the lossless image
compression formats PNG and JPEG-LS; and the Haar and Linear Wavelet,
and a specifically adapted Wavelet, that we call the Radial Line
Predictor. Additionally, JPEG-LS was tested in lossy mode for maximum
errors of 1, 2 and 4 millimeters. For more details and results see our
Tech Report below.
The software written for compressing the data onboard the robot, and
transmitting and displaying of an incremental 3D model in real-time
is available for download.
GVU Tech Report (PDF, 544kB)
Download the software
 Sample of 3D Models (click on images for full size):
Sample of 3D Models (click on images for full size):
-


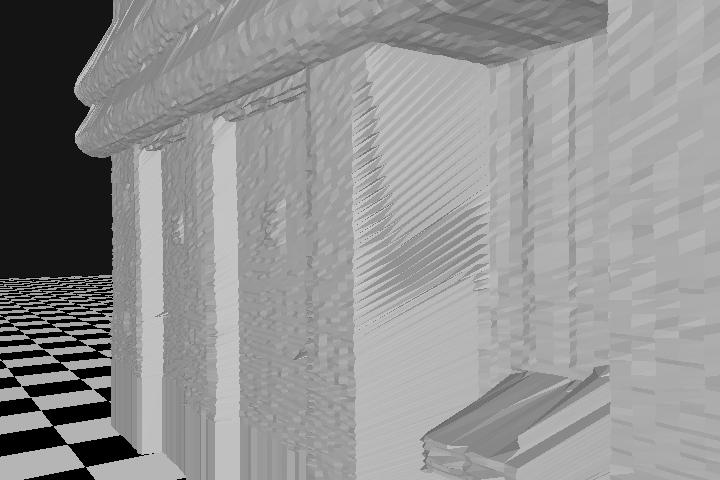
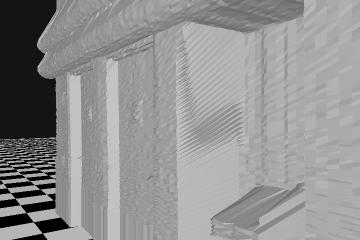
Corridor in the MaRC building. The checker board floor is added
for better visualization of the model. The corridor seems to be curved
due to the dead reckoning error of the robot. A picture taken from
about the same perspective is given for comparison.
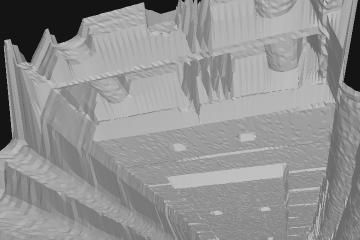
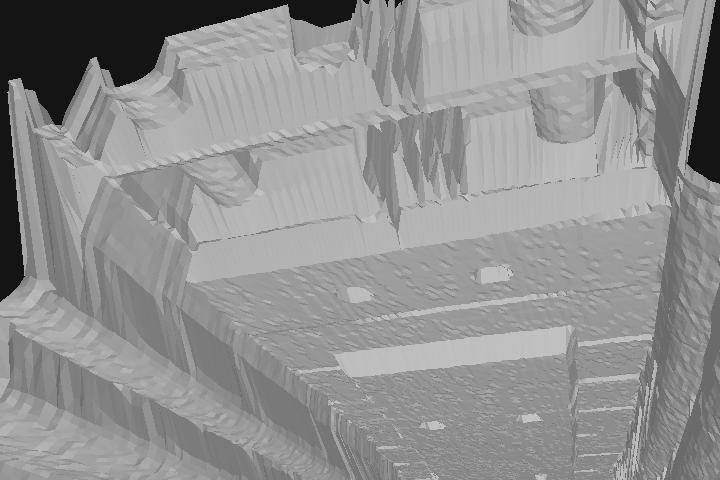
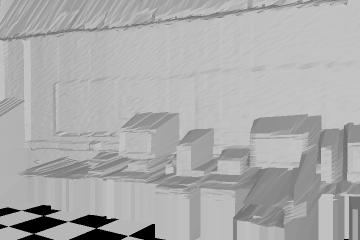
These two images are taken from the same corridor model as used
above. The left image shows doors and a water cooler, even the signs
on the doors and the door knobs are visible. The right side shows
pipes and lamps on the ceiling.
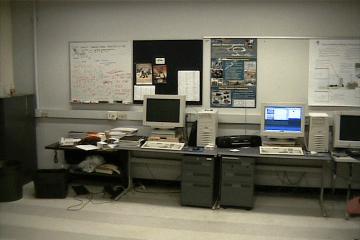
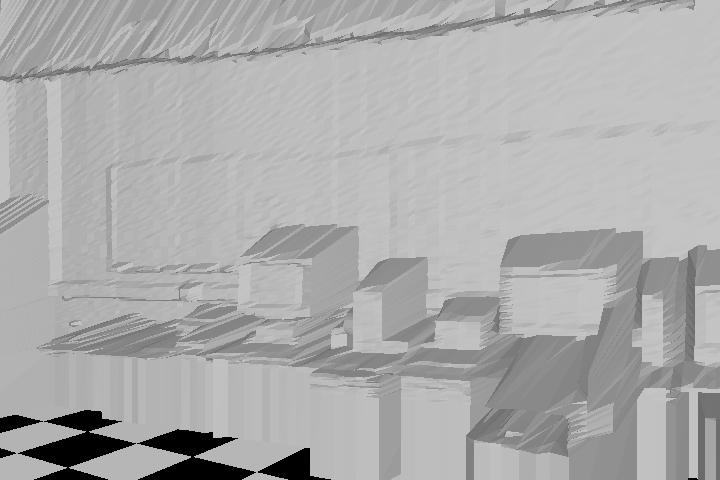
Equipment in the Mobile Robot Lab. Somebody put the radio there
before I could take the picture for comparison...


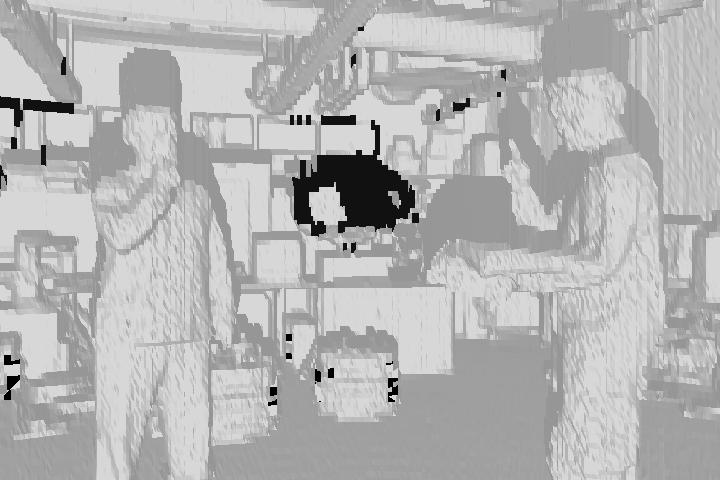
Alex and Endo in the Mobile Robot Lab. The blimp in the background
seems to be invisible to the laser scanner. For this model only the
laser scanner was rotated together with the top of the robot instead
of moved through the room by the robot.