Unmanned Aerial Vehicles
Project Director
- Dr. Dan Schrage.
Co-Principal Investigators in Mobile Robot Lab
-
Dr. Ronald C. Arkin.
- Dr. Steve Dickerson.
- Dr. George Vachtsevanos.
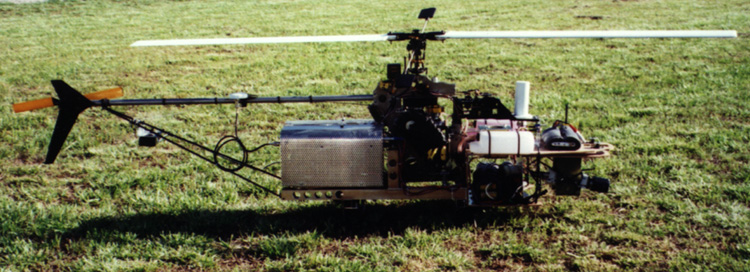
ASRT: Autonomous Scout Rotorcraft Testbed (funded by U.S. Army)
- An autonomous helicopter with
the ability to track a moving person-sized object
has been developed.
Integrated Product and Process design (IPPD) techniques were
deployed for this system. This large scale joint project
with other units at Georgia Tech had the Mobile Robot Laboratory
personnel responsible for the mission equipment package, which
consists of visual designation and tracking systems. The tracking
package was demonstrated in the Summer of 1996.

GTAR: Partially funded by an NSF SUCCEED Grant
- As part of an effort to introduce concurrent engineering practices
into the curriculum at Georgia Tech, a project centered on
constructing an autonomous helicopter has been undertaken. This
project is carried out in conjunction with a competition held annually
on the Georgia Tech campus by the Association of Unmanned Vehicles
Society. The research in our laboratory centers on the mission
planning and machine vision components for our autonomous helicopter.
Systems integration is a central issue in this effort as the project
spans many disciplines including computer science, and aeronautical,
electrical, mechanical and civil engineering.
- To visit our gallery page
containing movies of our AUVS entry click here .
AUVS Competition
- Check the World Wide Web server for the
Association of Unmmaned Vehicle Systems for additional information.
