Research
Here are some of our research areas. Click to learn more about the specific projects:
- Fluid simulation environments
- Swimmer models
- Interface
- Schooling
Fluid simulation environments
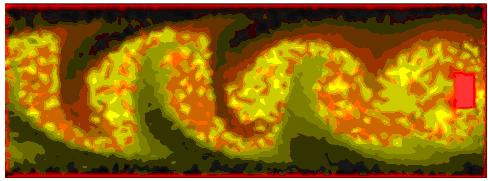
- Prof. Greg Turk and graduate student Kartik Raveendran have implemented a fluid simulator based on smoothed particle hydrodynamics (SPH) and its recent improvements. Although this approach does not guarantee incompressibility, it has the potential to be a fast simulator. This approach has good momentum conserving properties. Our current SPH simulator can interact with stationary objects that are embedded in the flow, and we are now working on moving rigid objects.
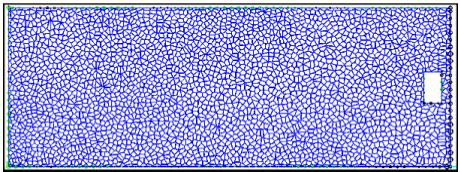
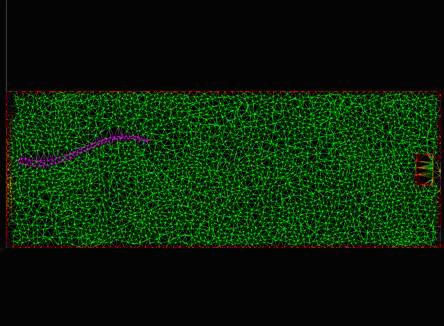
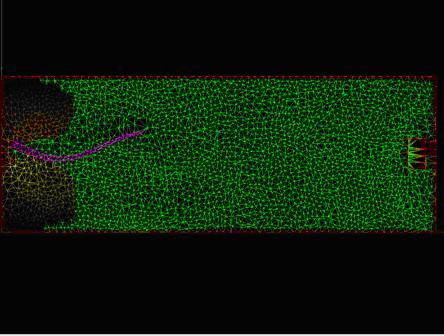
- Prof. Jarek Rossignac and graduate student Abhishek Venkatesh have invented and prototyped a new particle-based fluid simulator, that strives to preserve the area of the Voronoi region associated with each particle, so as to enforce incompressibility. A Delaunay triangulation is recomputed at each step using the CGAL utility. It produces promising results.
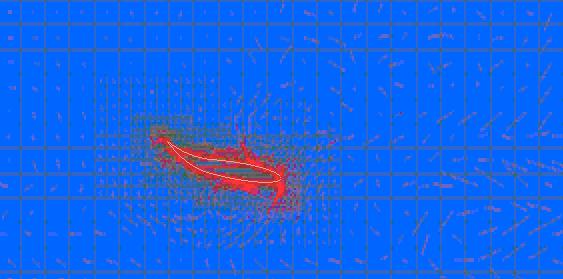
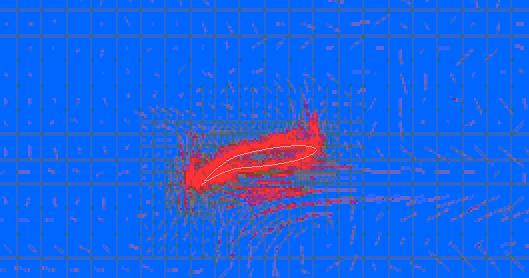
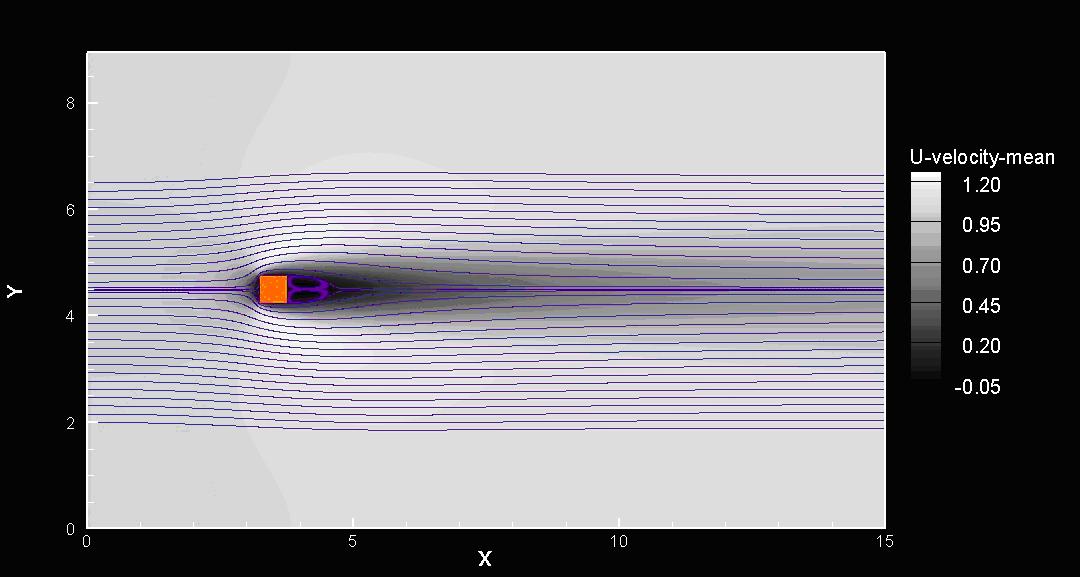
- Dr. ByungMoon Kim, who did his PhD under the supervision of Prof. Rossignac and is now NVIDIA is collaborating with the APL project and is developing a precise, adaptive-grid simulator. It already works and produced good results for rigid swimmers under a prescribed motion.
- Dr. Thorsten Stoesser and his graduate student, Sandeep Bomminayami, from Civil and Environmental Engineering at Georgia Tech are working to extend their precise fluid simulator to work with dynamic boundaries and then to a full bi-directional coupling between swimmer and fluid. We hope to use their simulator as a bench mark to evaluate the other, less accurate¡ªbut faster simulators.
Swimmer models
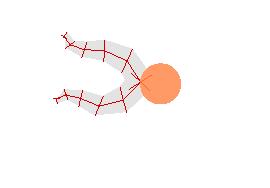
- PhD student Brian Whited and Prof. Rossignac have produced a prototype design environment where a scientist can draw the successive frames of (curves) representing the deformations of a planar fish and simulate its dynamics (rotation, translation, change of inertia moments) using normal-friction forces instead of forces exerted by the surrounding fluid. This na?ve environment allows to design and run simple swimming patterns, but does not correctly reflect the interaction with the water.
- Graduate student Kyle Olszewski has produced in initial integration of this swimmer with the particle-based fluid simulator developed by Abhished Venkatesh. Although the initial results are promising, many accuracy and performance problems remain to be addressed.
- Undergraduate students Tina Zhuo and Praful Rana have produced applets that simulate different swimming patterns. See for example the online applet from Tina: http://ihome.ust.hk/~ee_zwxaa/Pub/FishTank/
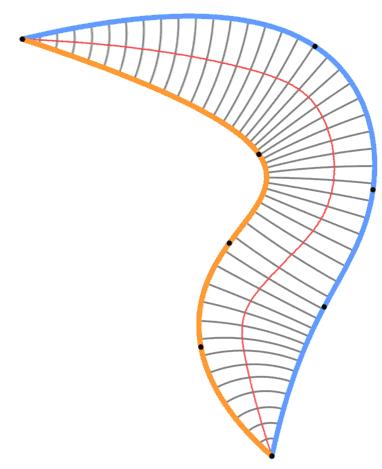
- PhD student Brian Whited and undergraduate student Yokhanan Beck, working under Prof. Rossignac¡¯ supervision have been exploring the generation and use of a skeleton that locally splits the swimmer into equal-area parts.
- Prof. Rossignac and his visitor from Barcelona (Prof. Vinacua) have been exploring the computation of interpolating steady affine motions as a means for designing shapes and animations.
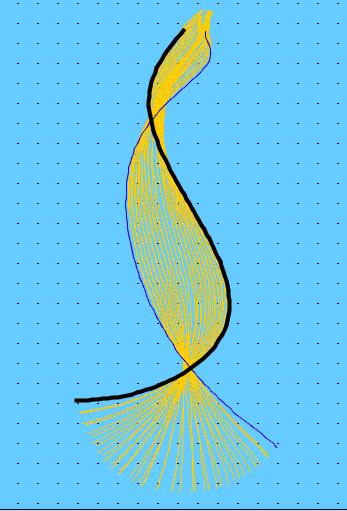
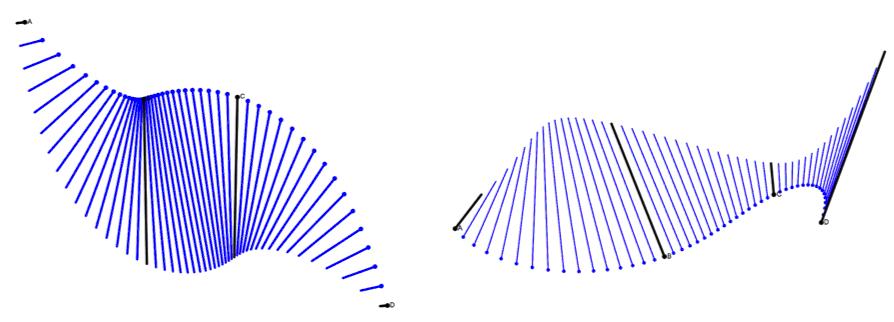
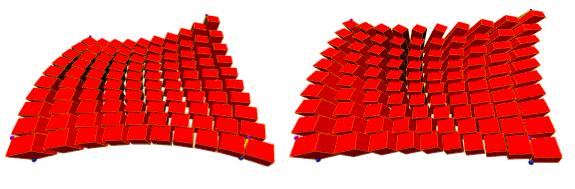
- PhD student Brian Whited and Prof. Rossignac have continued their exploration of morphing between series of two-dimensional key frames, which may represent the shape of the swimmer at different moments of the swimming pattern. They have implemented a variety of morphing techniques and have produced extensive comparisons of their physical propertites.
- Graduate student Karthik Ravendraan and Prof. Turk are developing a mass-spring model of a swimmer and plan to couple it with the SPH fluid simulator. They have implemented a rigid body simulator using different numeric integration methods, including high-order Runge-Kutta methods, implicit Euler method, and Trapzoidal method.
Interface
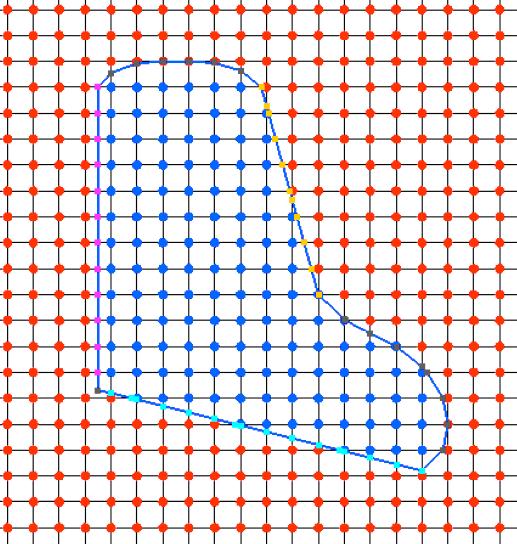
- Graduate student Kyle Olszewski has been working with Prof. Rossignac, Prof. Turk, Prof. Stoesser, Dr. Kim, and graduate student Sandeep Bomminayami (from Civil and Environmental Engineering) to design and implement an interface between the swimmer and the fluid. The interface is responsible for providing a framework and the computational tools for the geometric queries that must be answered to allow the bidirectional coupling: The swimmer needs to know the fluid pressure and friction forces acting on its boundary; The fluid grid or particles must know their relation and distance to the swimmer.Furthermore, our swimmers simulators are written in Java or Processing, while the fluid solvers are written in Fortran or C++. Hence, a programming interface had to be designed and developed for coupling such programs.
Schooling
- Undergraduate student Sehoon He and Prof. Karen Liu and Prof. Ewa Kanso have started to explore the mechanisms of fish schooling. The goal of the project is to understand the fish schooling behaviors by simulating the dynamics of a school of fish and fluid environment, modeling interaction among fish with the fluid medium, and deriving the optimal control policy for individual fish. Because fish swim in highly organized formation, it has been hypothesized that schooling behaviors reduce energy expenditure of locomotor. However, direct evidence has been elusive due to the difficulty in designing controlled experimentations and acquiring consistent data for a large number of individuals. By providing a set of computational models and simulation tools, this project will enable researchers to verify hypotheses of energetics of swimming formation, as well as discover other factors related to the schooling patterns.