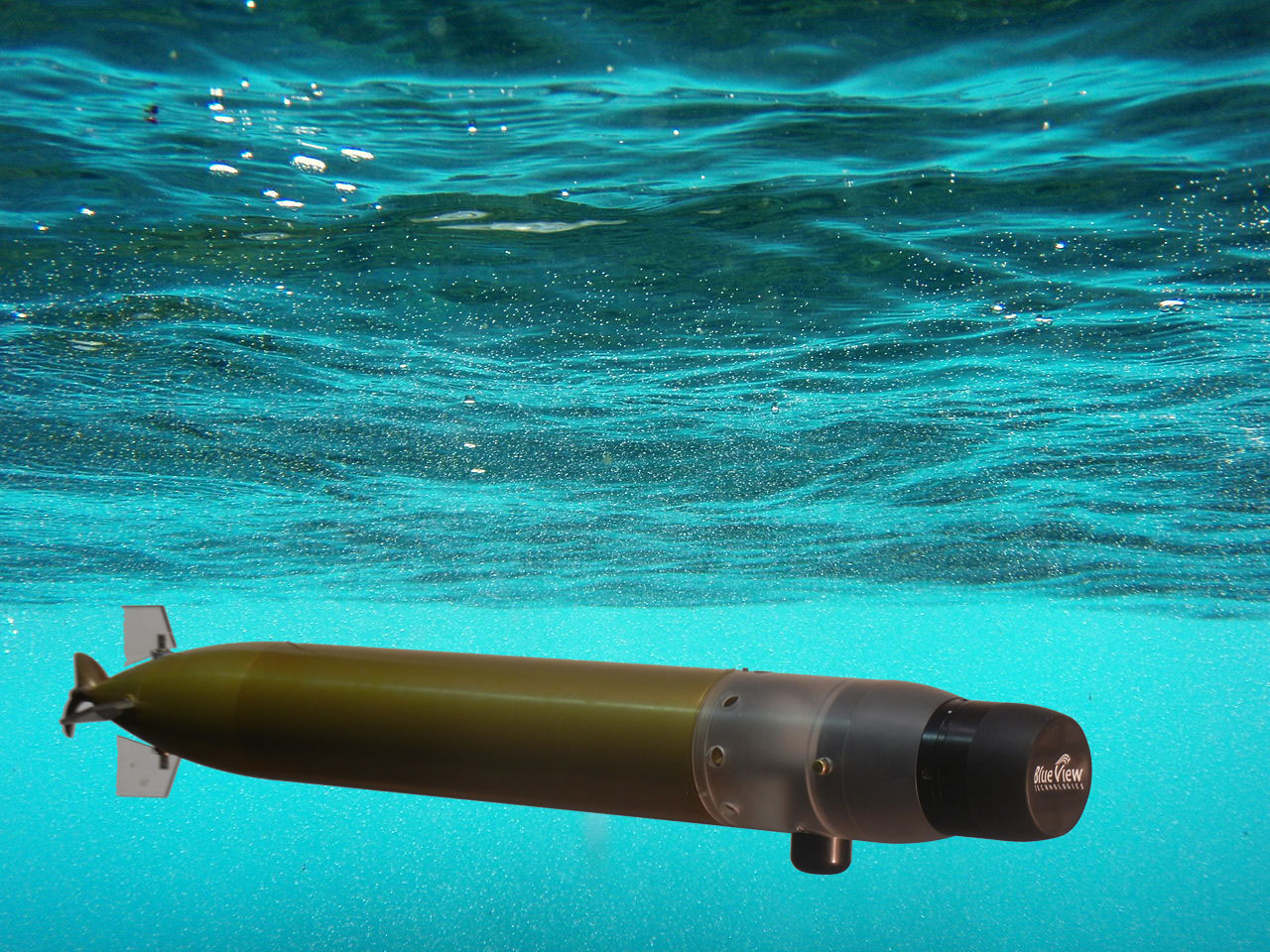

Homogeneous Control of Multiple Unmanned Underwater Vehicles is a G.T.R.I project which has the goal of designing several man-portable underwater vehicles for autonomous collaborative behaviors.
The CoaX from Skybotix is an advanced micro aerial vehicle. For a quick demo using only its limited onboard processor and inexpensive webcam I used color segmentation for object detection and a PID controller for tracking and trailing an orange bucket. Check out the video
.
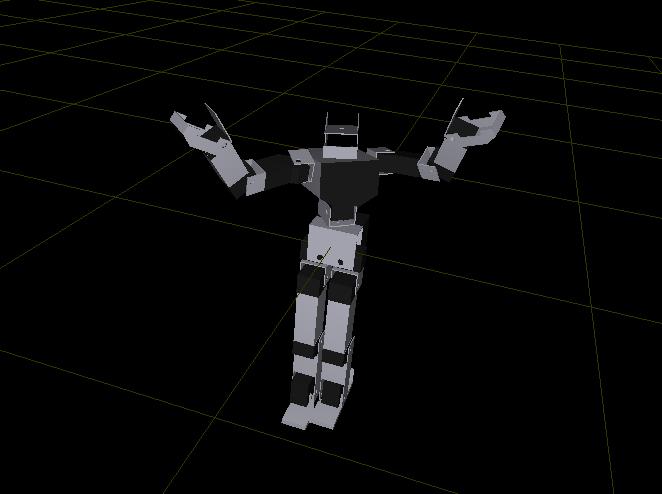
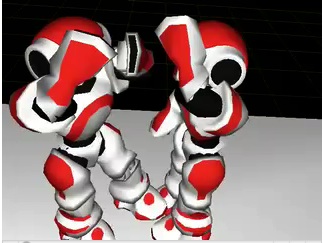
In this project I modeled "Kai" an actual humanoid robot designed by Farell Robotics. Using Jacobian Based inverse kinematics a motion planner was then created which combined the Center of Mass and Zero Moment Point to create a stable walk both in simulation and then on the actual robot.
This great project aids the visually impaired experience an aquarium through sonification. If you are ever on the third floor stop by and get a demo ... it is a very rewarding experience
This is a humnoid robot motion planning project as part of Robot Intelligence - Planning in Action taught by Assistant Professor Mike Stilman. It utilizes Jacobian methods for the inverse kinematics, potential fields for obstacle avoidance, and bezier curves for acceleration.
The Automatic Color Gamut Calibration program adjusts the color of an entire image by locating the GretagMacbeth ColorChart which is then unprojected and the colors are sampled so that comparison with the correct colors can be made. See the powerpoint presentation
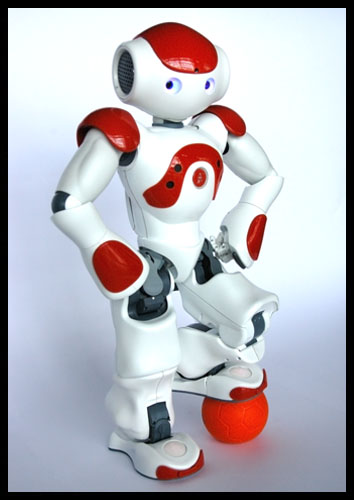
This was a joint GT/CMU team under advisors Tucker Balch and Manuela Veloso that worked with the humanoid Nao Robot placing in 2nd out of 19 teams. I was in charge of implementing communication and motion planning.
The Grocery Hunter was a final project for Human Computer Interaction under Dr. Bruce Walker. The team modified a palm sized PDA that would give clues to children about grocery items which they in turn would find in the store as their parents were shopping. The idea is to have the children learn about healthy foods through an interactive game in order to stem the childhood obesity epidemic.
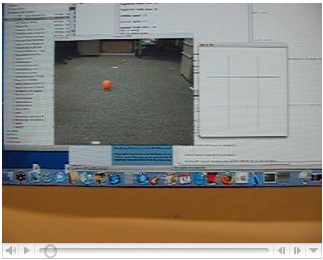
My first true computer vision experience was with tracking an orange ball using a particle filter. This was a special problems course with Professor Frank Dellaert As you watch the video there are marks of tape on the floor marking a grid world on the floor so that I could do a homography. The red square in the white map corresponds to the orange ball on the floor. I also thank Professor Jose Maria Canas Plaza for guiding me through the process.
 ...see more
...see more