



Featured Projects
|
How might we create confidence and increase communication to riders of a public transportation system? This project is focusing on creating an interactive display and experience for riders of the Georgia Tech Bus system. The goals of this display is to provide multi-sensory, at-a-glance information about the bus system in relation to the station's current location, while also providing more detailed information on closer inspections for users that wish to make a more informed decisions around using the bus. |
This study describes a data-driven visualization approach to the systemic study of innovations in global supply chain networks. We demonstrate its applicability with illustrative examples of real-world supply chain in the electronics industry. Our visualization approach enhances the hypothesis-generating process as it can reveal important clusters, patterns, trends, and outliers in the networks. 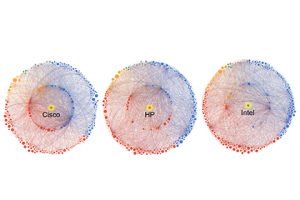 |
ClipLine, a social sharing mobile platform that helps users turn their favorite TV scenes into customized GIFs and instantly share them with their friends and the outside world. Voting up the best GIFs, re-clipping, and following other accounts will also be main features of ClipLine.  |
About GVU

RESEARCH
23 Core Areas

PEOPLE
300 Researchers

PROJECTS
250 Current

LABS
80 Partners

FUNDING
$9 Million in Grants
GVU Resource Labs
App Lab
Built for Success
A mobile computing "hackerspace."
Visit the App Lab website
Location: TSRB 333

GVU Prototyping Lab
From Concept to Creation
A rapid prototyping "makerspace."
Visit the Prototyping Lab website
Location: TSRB Basement

GVU Craft Lab
Making for All
A soft-goods "makerspace."
Visit the Craft Lab website
Location: TSRB 225B

Usability Lab
Testing Methods and Technology
An adaptable project testing space.
Visit the Usability Lab website
Location: TSRB 216
