



Featured Projects
|
COVID-19 and recent racial injustices like the killings of George Floyd, Ahmaud Arbery, and Breonna Taylor have highlighted the importance of social ties. Amidst the viral pandemic, many have socially distanced themselves from their social networks, breaking down crucial support systems and creating threats to one's psychosocial well-being. On the other hand, recent racial injustices have also sparked unprecedented social movement that have mobilized social networks to take collective action for social change. As such, both of these stressors emphasize the importance of social ties and network |
In collaboration with colleagues from Malmö University in Malmö Sweden, the AEL is helping to develop a mixed-reality experience that is a narrative of cultural moments from the first half of the twentieth century. The Swedish project, under the direction of Profs. Maria Engerberg and Per Linde, is called Stadsfabula. The AEL is helping to create and test an Argon application that will recognize historic photographs on the walls of a museum space and play the video and audio. 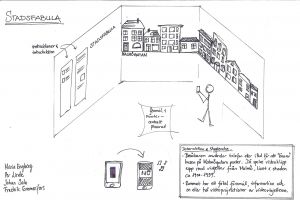 |
Currently 6.8 million children in America have asthma, a disease of the respiratory system that causes inflammation of the airways. An asthma action plan is an individualized health management plan that doctors give to their patients to help control their condition. It functions by illustrating what actions to take at different levels of symptom severity from day-to-day medication use to emergency situations. A problem arises for the caregivers of asthmatic children who may not have the educational background to understand the information in an action plan. 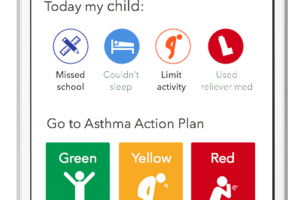 |
About GVU

RESEARCH
23 Core Areas

PEOPLE
300 Researchers

PROJECTS
250 Current

LABS
80 Partners

FUNDING
$9 Million in Grants
GVU Resource Labs
App Lab
Built for Success
A mobile computing "hackerspace."
Visit the App Lab website
Location: TSRB 333

GVU Prototyping Lab
From Concept to Creation
A rapid prototyping "makerspace."
Visit the Prototyping Lab website
Location: TSRB Basement

GVU Craft Lab
Making for All
A soft-goods "makerspace."
Visit the Craft Lab website
Location: TSRB 225B

Usability Lab
Testing Methods and Technology
An adaptable project testing space.
Visit the Usability Lab website
Location: TSRB 216
