Experiments

In the non-social case consider two traditional approaches to obtaining training samples: random and systematic structuring of the environment. In the systematic case, Junior interacts with each object one by one in all possible configurations. The radial distance of the object, its relative angle and its orientation and is varied with equal intervals. The distance is varied with 1 inch intervals and the angle with 15 degree intervals. The cube object is tested with 2 different orientations (robot facing surface, robot facing corner), the rectangular prism with 5 orientations and the T- object is tested with 10 orientations. Based on the size of the workspace (90 degree, 8 inch) the systematic data collection includes 1824 interaction samples. In the random case the object, the location and the orientation are randomly selected and the interaction is not interrupted until the object leaves the workspace or no effect occurs for two consecutive actions. This process is repeated 200 times.
Non-social case
Junior tries to learn the affordances of objects by playing with them. It does this in two different modes: social and non-social. The social case involves interaction with a human teacher, where the teacher has control of which objects the robot is playing with. In the non-social case the robot explores the objects and learns by himself.
In the social condition the human teacher decides on the kind of interaction that Junior will experience. The subjects are first briefed about the meaning of affordance and they are told that their task is to teach Junior affordances of the five objects. In the pilot study we performed open ended training sessions in which subjects decided when to stop training. Each subject started training with either of poking and grasping actions and decided when to switch to the next action.
Social case
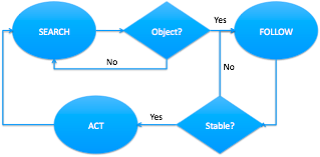
Interaction
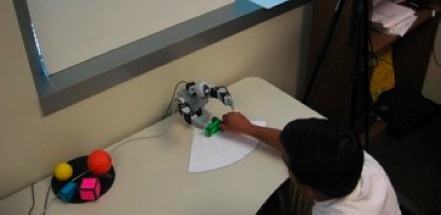
Junior also has some basic behaviors for interacting with its environment. It has a searching behavior that explores the body orientation and head position space until an object enters the field of view. It has a fixation behavior that orients its body towards an object and bows its head/camera such that the object is at the center of the visual field. Once fixated on one object that stays stationary for a certain time, Junior tries its action on the object.
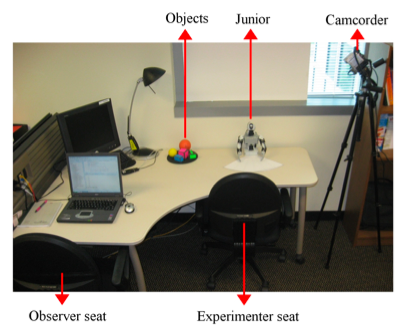
Setup