Henrik’s Blog

Mobile Manipulation Exam
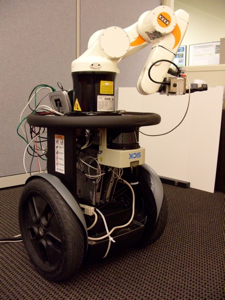
The exam/demonstration for 4632B on mobile manipulation took place today. One group did 3 complete cycles of coffee delivery, the two other groups did partial cycles. The system is composed of a Segway RMP200 with a KUKA KR-5 sixx arm mounted on top. The strategies demonstrated included - particle based object localization, MC localization, visual servoing (image and 3D based). Sample video results are available here (4MB Quicktime). For a class projects the results are encouraging.
Thursday, May 3, 2007
Henrik’s Blog