Project 2: Local Feature Matching
In this assignment we create a local feature matching algorithm which is a simplified version of the SIFT pipeline.Obtaining Interest Points
We use the Harris Corner Detection algorithm for keypoint detection and localization. Basically we evaluate the cornerness score for each point in the image. We discard points for which the cornerness score is less than 0.001. We also discard points which are within the feature_width/2 pixels of the boundaries. Further we use a sliding window on each corner point to check if it is the maximum within a neighborhood ([3 3], [feature_width/2 feature_width/2]). If it is not, it is discarded. The keypoints are then sorted in decreasing order of cornerness and the best 1500 are returned.Extracting Features
We use the standard gradient orientation histogram in 8 bins as features. The feature length is 128.Feature Matching
We use the nearest neighbor distance ratio to estimate confidence of matches.Bells & Whistles:
- KD-Tree based nearest neighbor search
We use the knnsearch function to do a KDTree based nearest 2 neighbor search in features2 for every entry in features1. Thereafter we use obtained values to compute the NNDR. - Principal Components Analysis to reduce descriptor dimension
To reduce the dimensionality of the features from 128 to 32, I generate a PCA basis from the 90 or so images in the extra_data.zip provided on the project page. The combined percentage variance for 32 dimensions comes out to be about 62.38%. We also extract a global mean feature mu. I have created a separate function match_feature_pca() which first uses the computer PCA basis, W to reduce the dimensionality of the features to 32 and then perform the matching algorithm (kNN).
Tweaks & Results
| #interest points | feature_width | non-max suppression win size | PCA | % Notre Dame | % Mt. Rushmore | % Episcopal Gaudi |
| <=1500 | 32 | [8 8] | yes | 80 | 65 | 7 |
| <=1500 | 32 | [8 8] | no | 85 | 88 | 5 |
| as many avbl | 32 | [8 8] | yes | 90 | 100 | 13 |
| as many avbl | 32 | [8 8] | no | 92 | 99 | 17 |
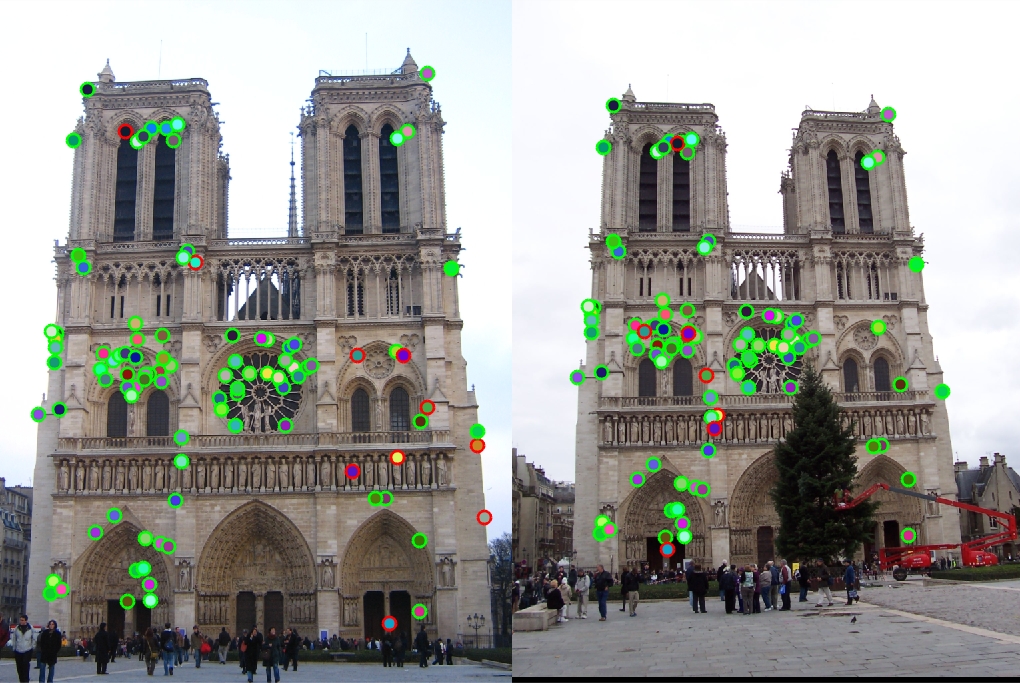 Notre Dame | 90 good matches, 10 bad matches
Notre Dame | 90 good matches, 10 bad matches
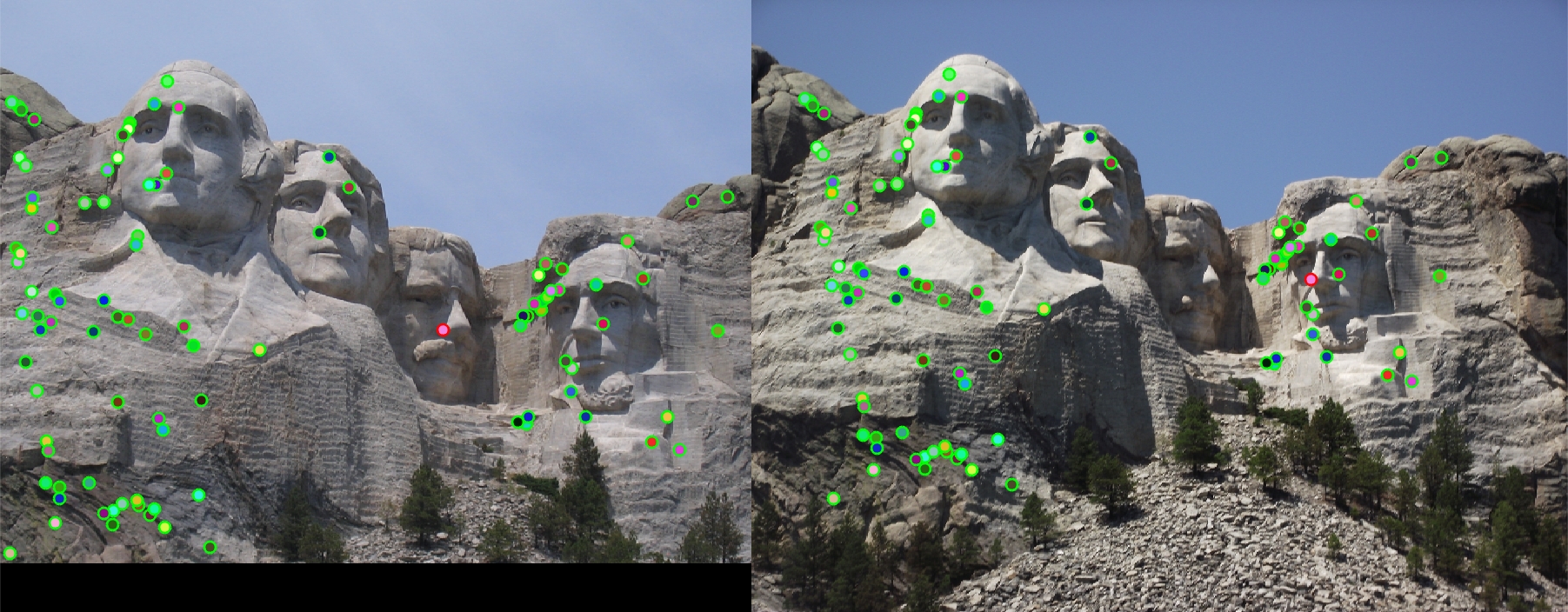 Mt. Rushmore | 99 good matches, 1 bad match
Mt. Rushmore | 99 good matches, 1 bad match
 Episcopal Gaudi | 13 good matches, 87 bad matches
Episcopal Gaudi | 13 good matches, 87 bad matches
 Capricho Gaudi | Majority of points seem to be matched correctly
Capricho Gaudi | Majority of points seem to be matched correctly
 House | Almost all points seem to be matched correctly
House | Almost all points seem to be matched correctly
 Pantheon Paris | Only a few points matched correctly
Pantheon Paris | Only a few points matched correctly
 Sacre Coeur | Only a few points matched correctly
Sacre Coeur | Only a few points matched correctly
 Statue of Liberty | A Fair number of points seem to have been matched correctly
Statue of Liberty | A Fair number of points seem to have been matched correctly