Project 2: Local Feature Matching
Harris Corner Detector
As a way of getting interest points of the figures, Harris corner detector is implemented with the formular of:

Process Flow
- Compute image gradient Ix and Iy with the Sobel operator.
- Compute Ix2, Iy2 and IxIy.
- Compute
g(Ix2),g(Iy2)andg(IxIy)with a Gaussian filter. - Threshold out points below certain score.
- Use
BWCONNCOMPfunction in Matlab to group connected points together. - Take the only the point with maximum value of score in each group.
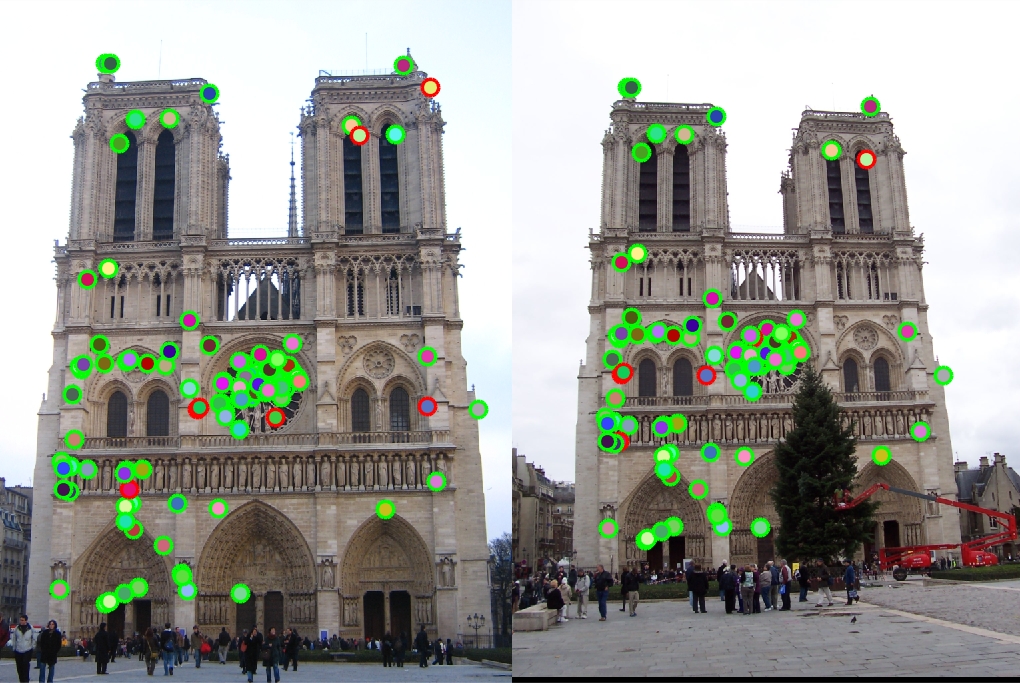
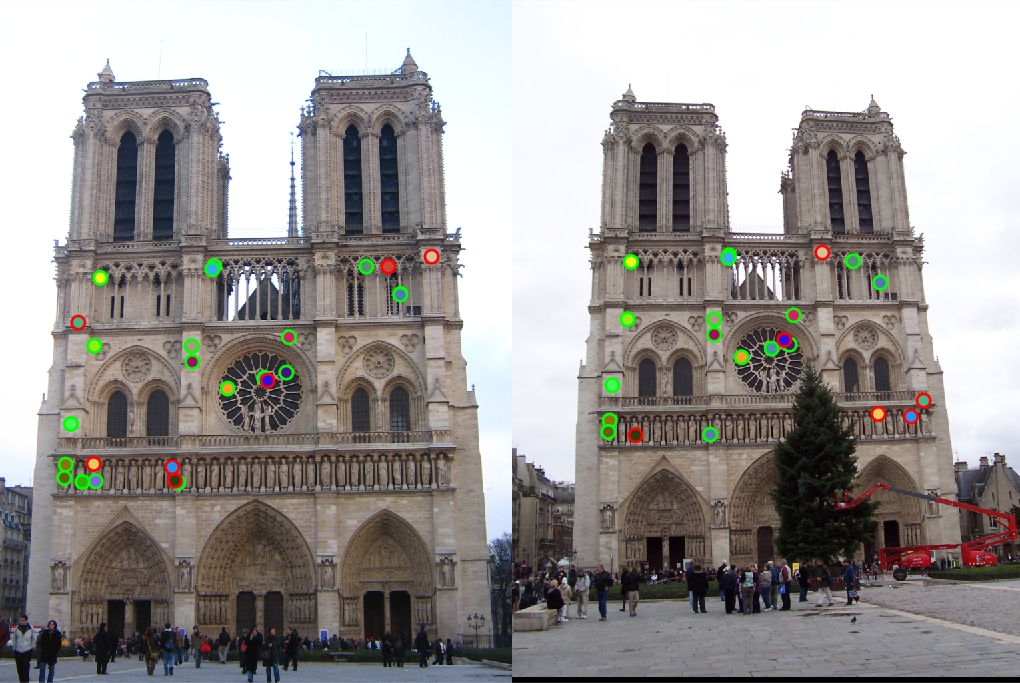
Result - Interest Points
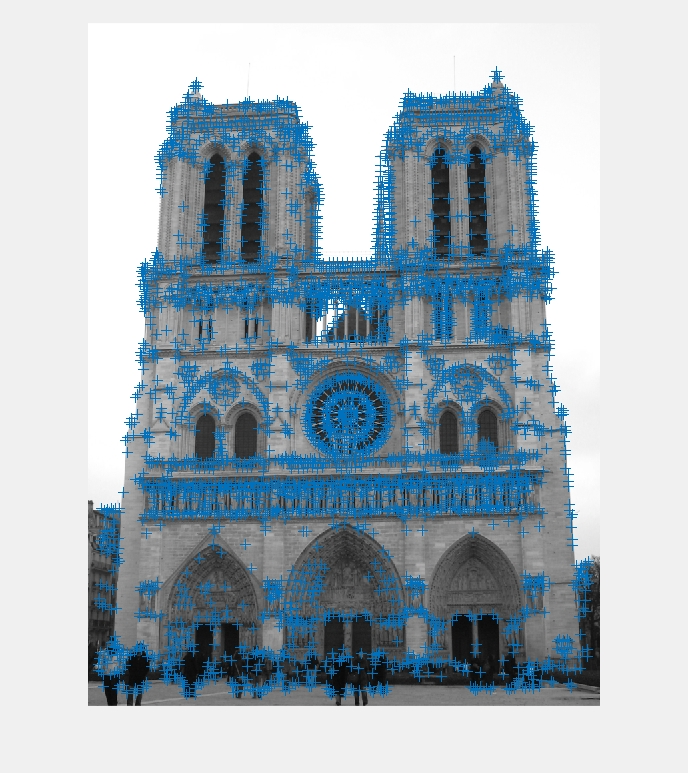
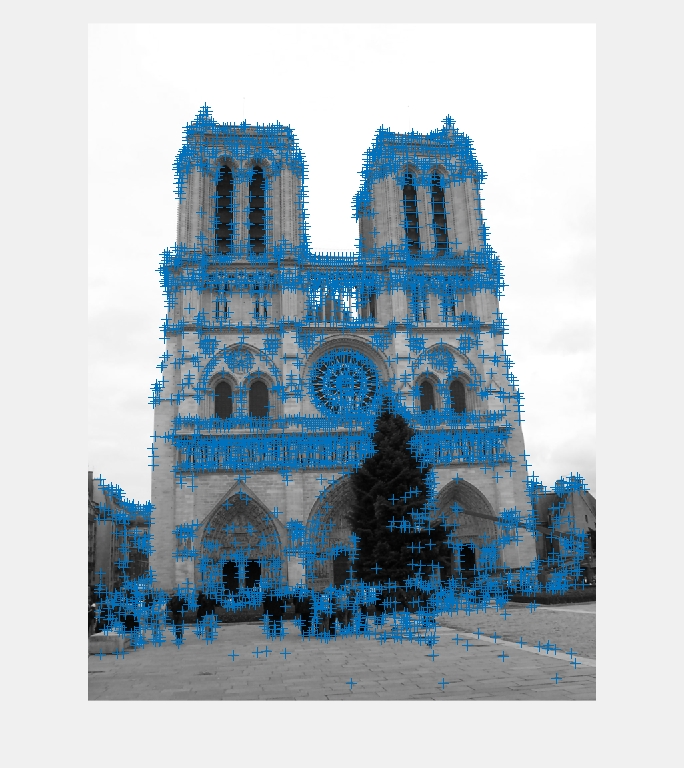
Interest points on Notre Dame images by Harris corner detector. |
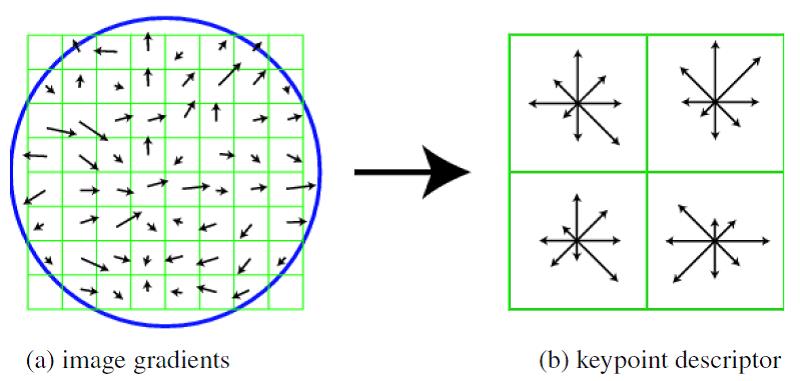
SIFT-like Local Feature
A figure below represents a schematic explanation of SIFT.
Process Flow
- Create a 16x16 window around each keypoint.
- Compute the gradient magnitude and direction for each window.
- Weight the magnitudes according to their distance from the center pixel by using a gaussian filter.
- Break the window up into 16 cells of size 4x4.
- Form a histogram for each cell by dividing the gradients into 8 buckets, each covering 45 degrees.
- Sum the weighted magnitudes of the gradients in each bucket.
- Append each cell's histogram to form the 1x128 feature descriptor vector.
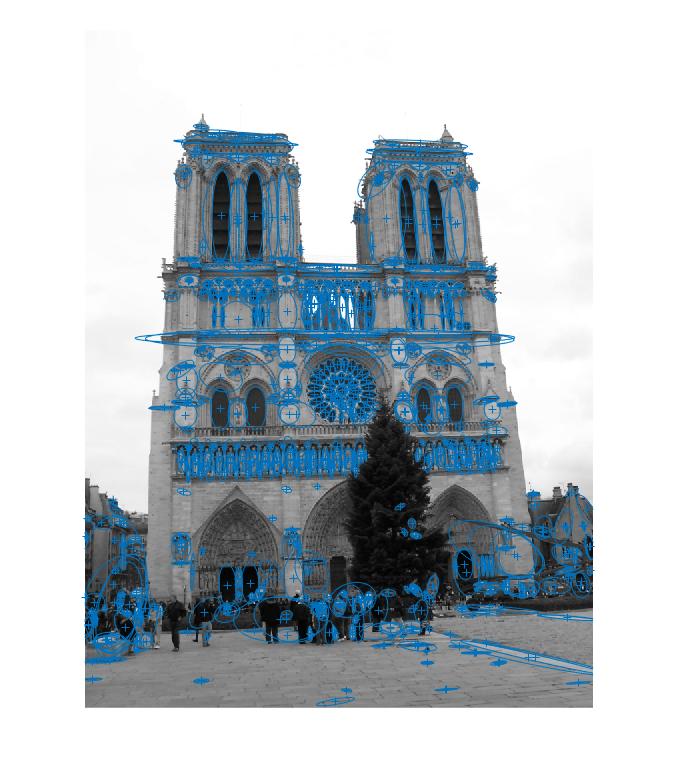
Ratio Test Matching
Process Flow
- Set a threshold (roughly 0.7 ~ 0.8).
- Take the ratio of "d1 = first nearest distance" to "d2 = second nearest distance"
- Match if the ratio less than the threshold.
- Sort these matches based on the confidence.
Results
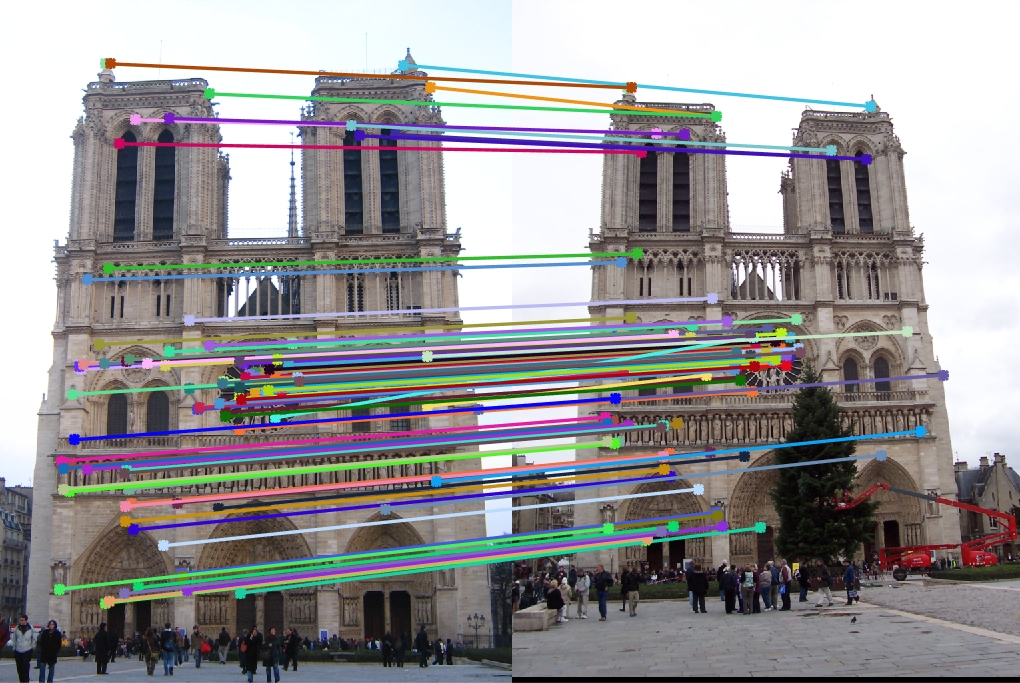
Notre Dame (top 100 points) : 93/100, 93% accuracy |
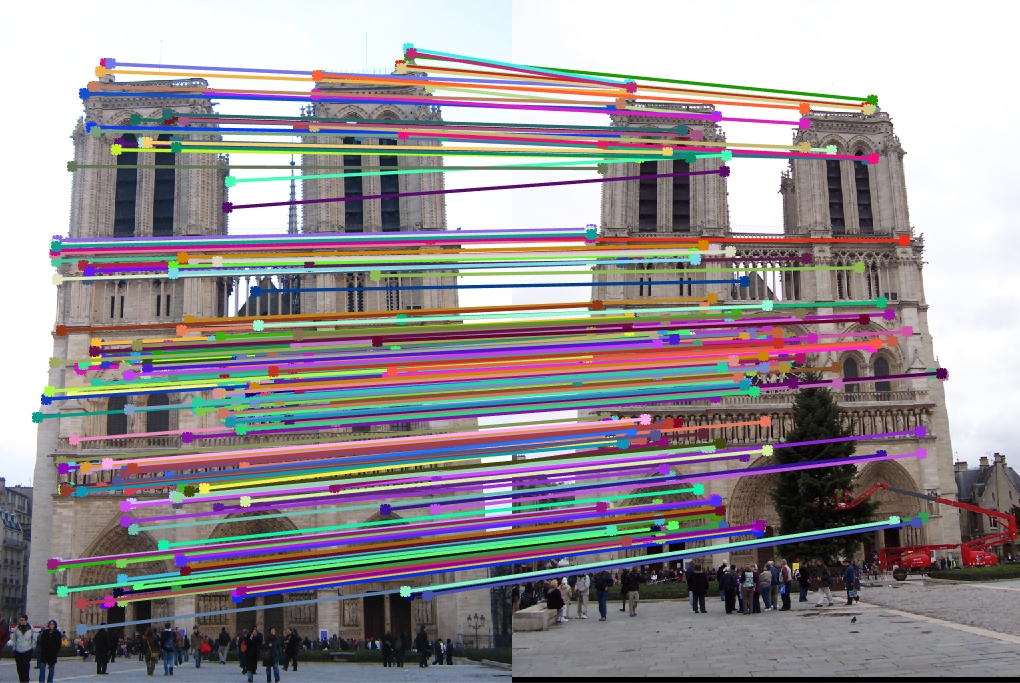

Notre Dame (total 278 points) : 255/278, 92% accuracy |


Mount Rushmore (top 100 points) : 96/100, 96% accuracy |
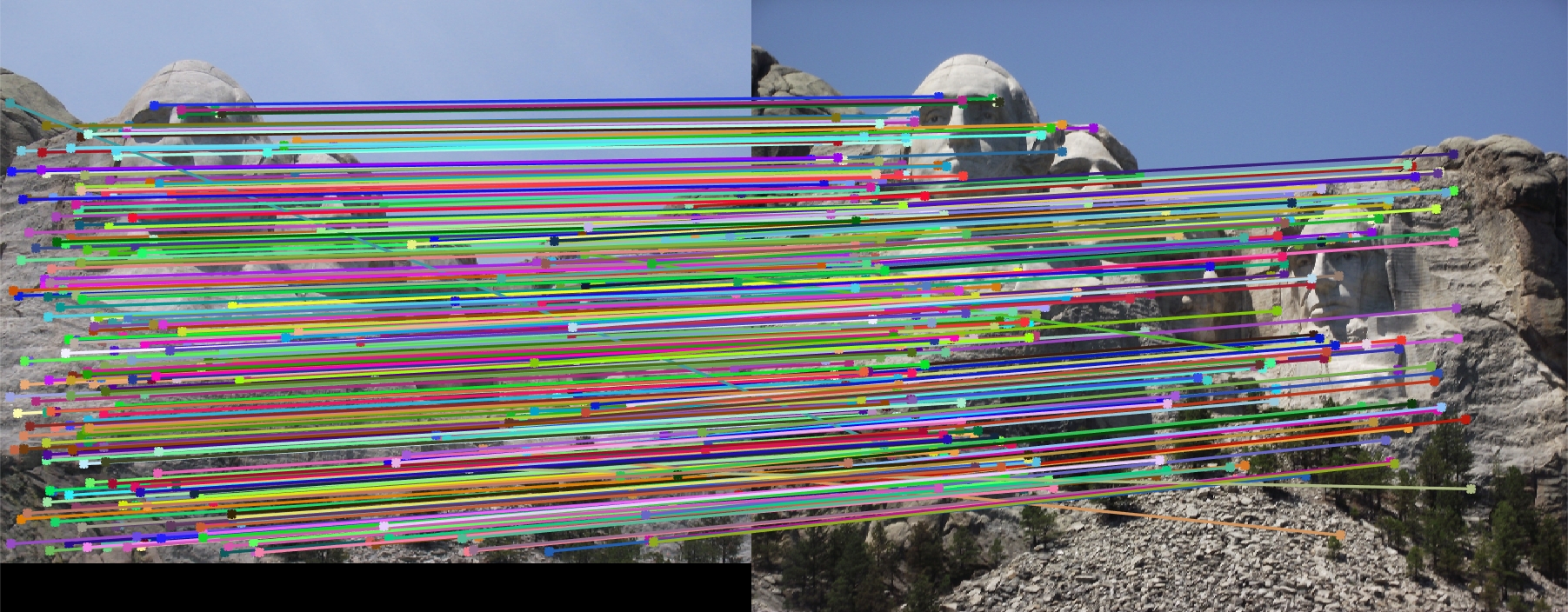

Mount Rushmore (total 344 points) : 325/344, 94% accuracy |


Episcopal Gaudi (total 69 points) : 59/69, 86% accuracy after scaling the 2nd image down by 0.6 (Before scaling : 25~40 % accuracy) |
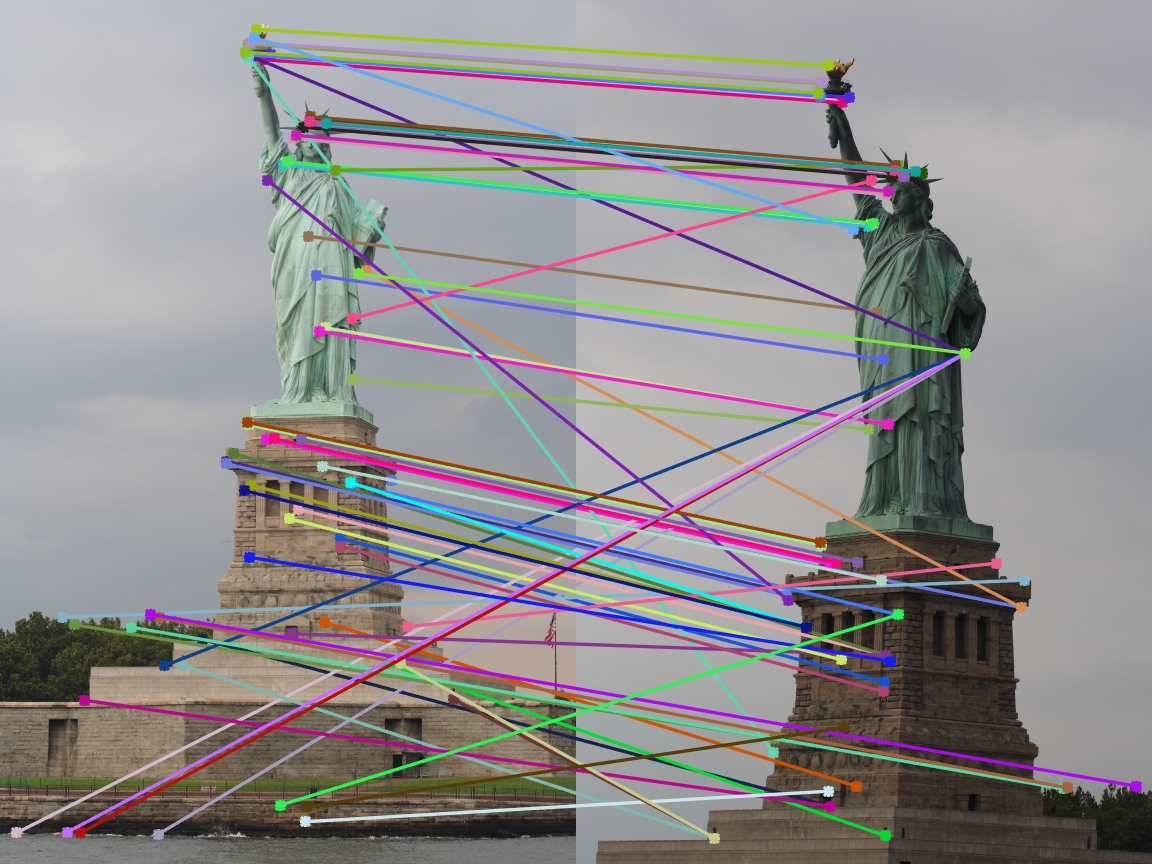
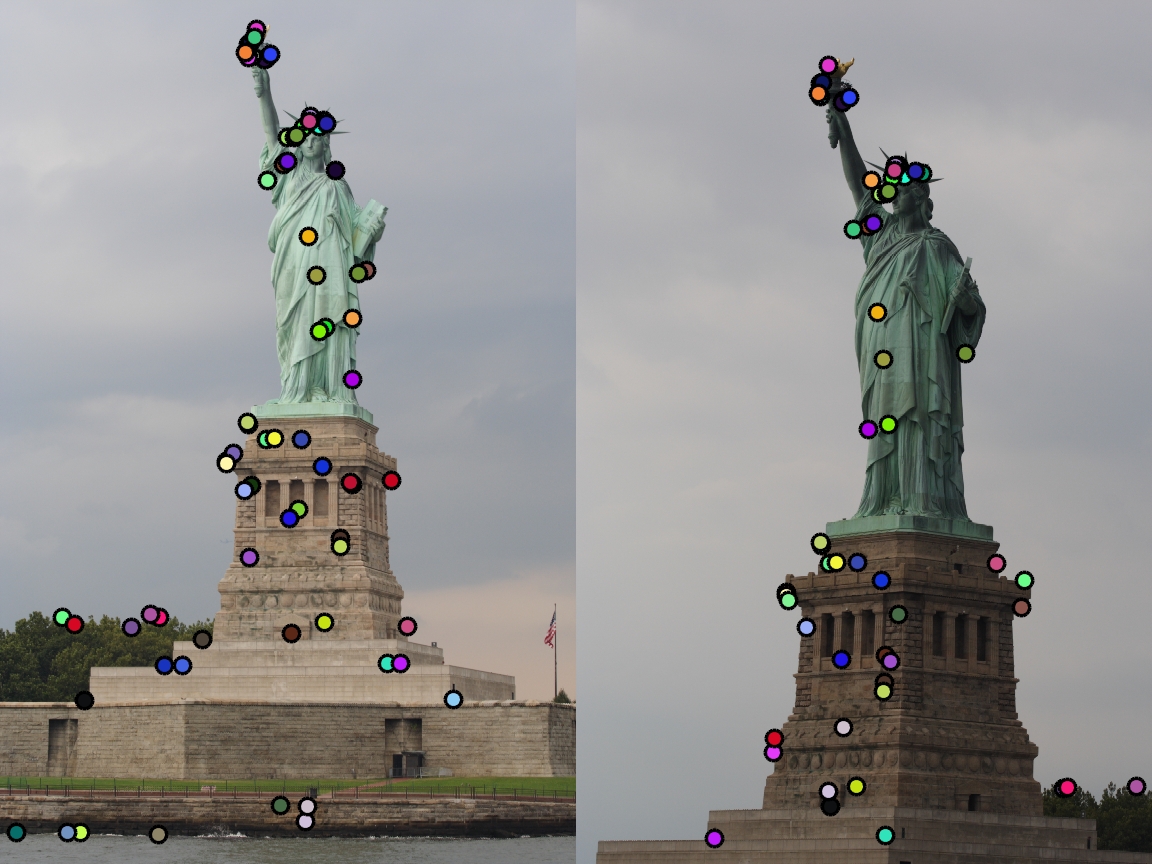
Statue of Liberty |
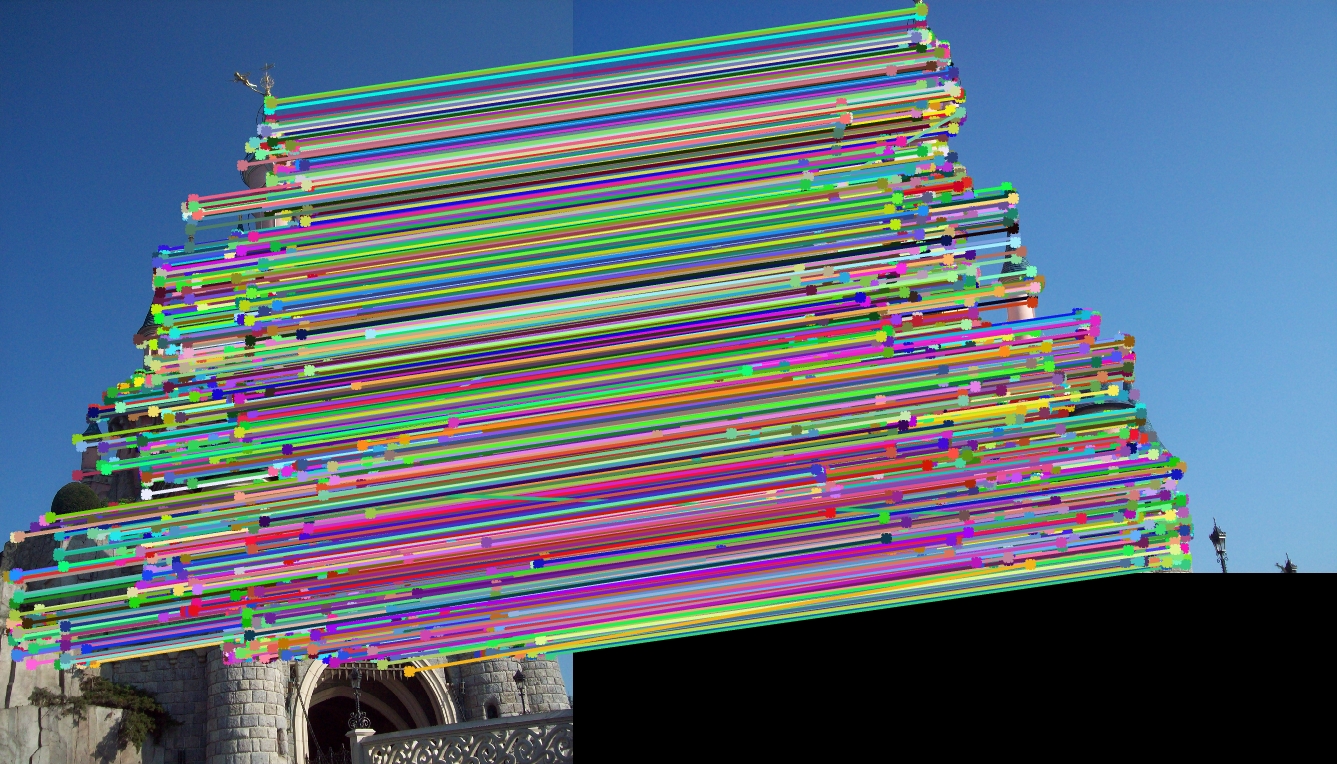

Sleeping Beauty Castle Paris |
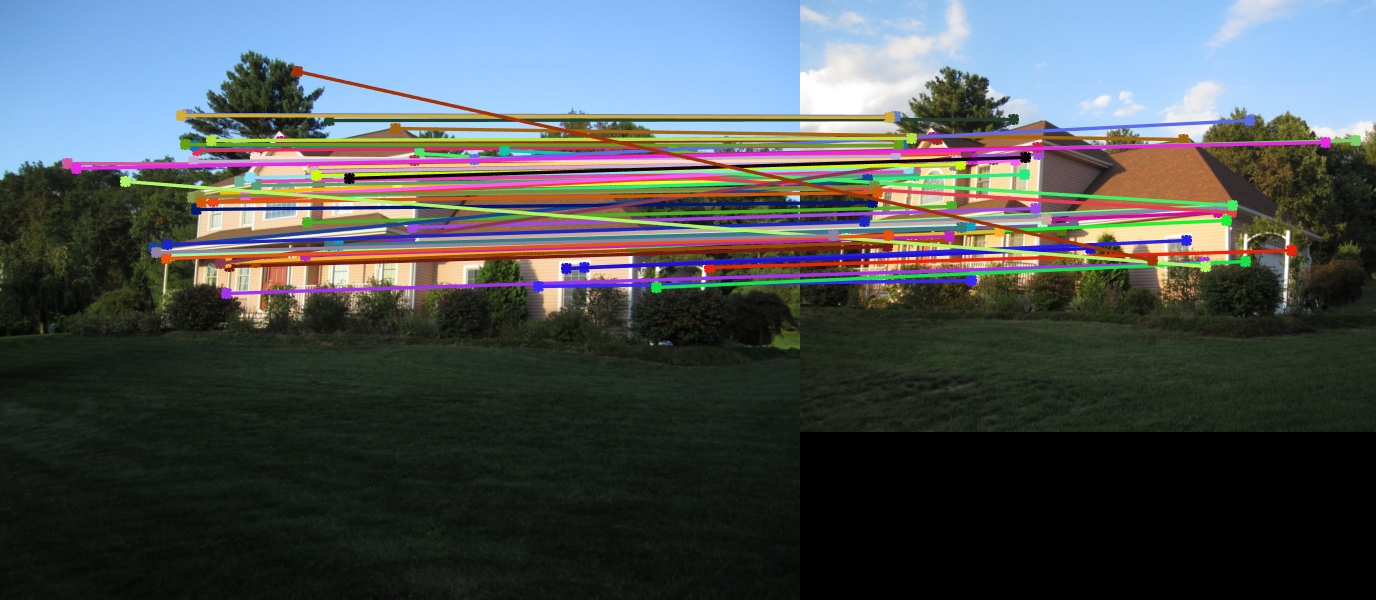

House |
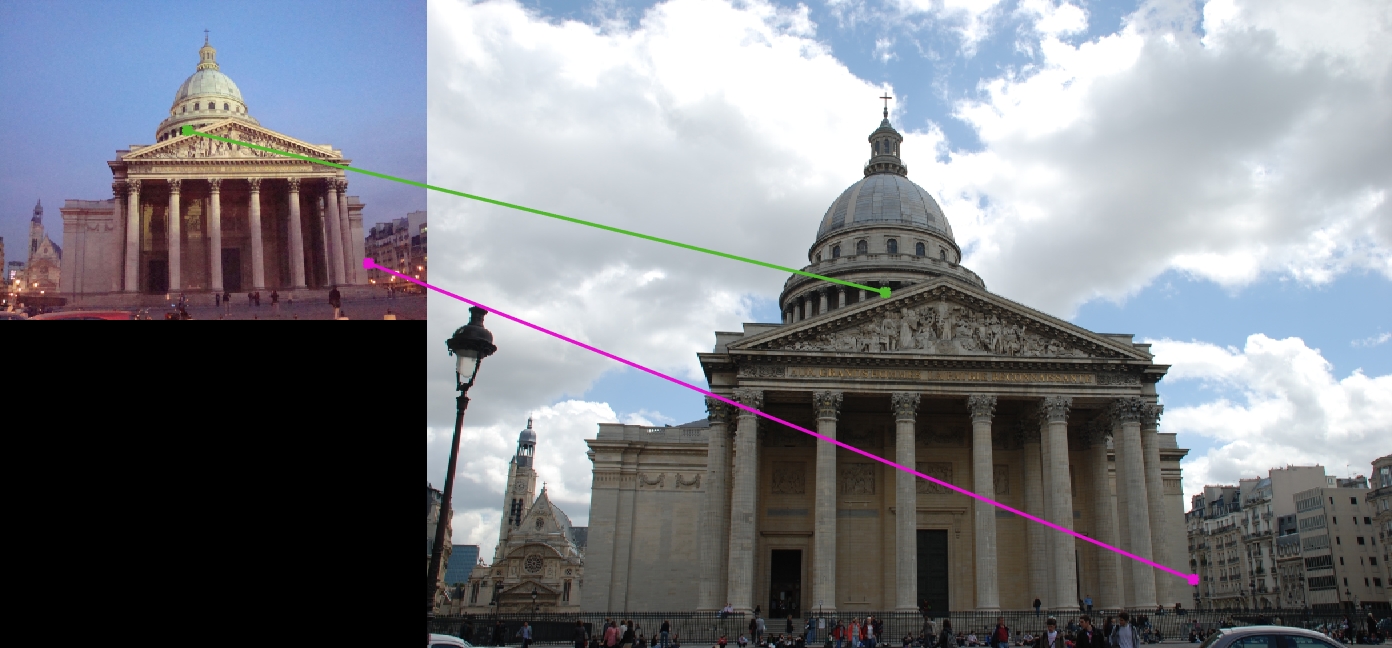

Pantheon Paris (an example for scale effect : a small number of matching points) |
Extra Credit : MSER (interest point detection)
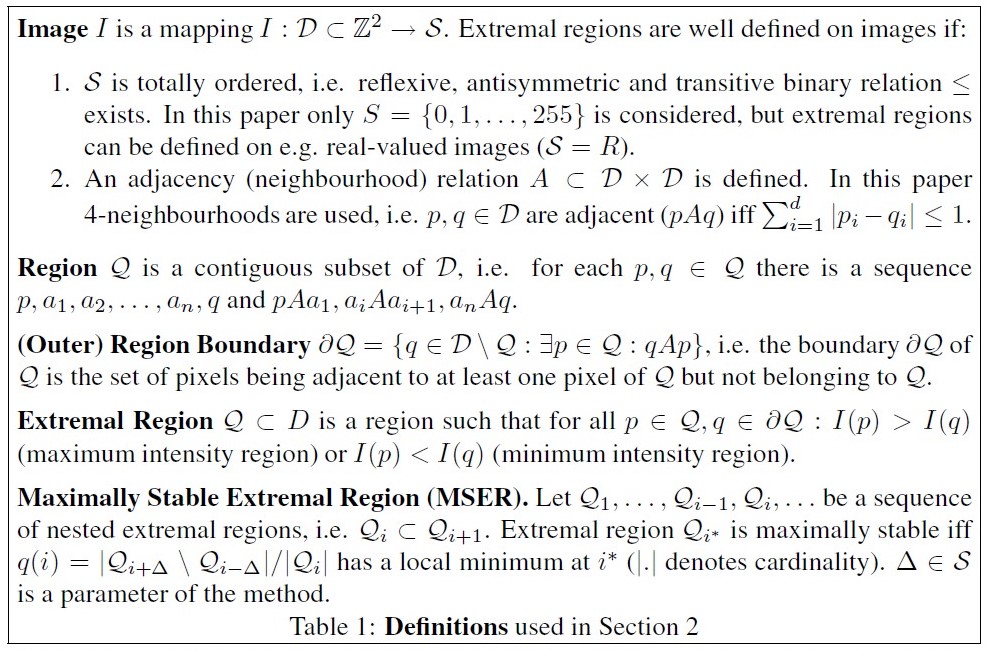 Based on the paper by Matas [1],
this technique checks for regions that remain stable over a certain number of thresholds.
If a region Qi+Δ is not significantly larger than a region Qi-Δ,
region Qi is taken as a maximally stable region. Interest point is determined as the center point of the maximally stable region over a certion threshold value so that we can choose the space on the objects.
The stable region is assumed an ellipse in shape for ease of computation. Since I used the same local descriptor, the points near the image edges were suppressed.
MSER takes apporoximately the center point of a stable region as an interest point. Therefore, the current feature descriptor which uses adjacent fixels may have a lower matching accuracy as shown below.
Based on the paper by Matas [1],
this technique checks for regions that remain stable over a certain number of thresholds.
If a region Qi+Δ is not significantly larger than a region Qi-Δ,
region Qi is taken as a maximally stable region. Interest point is determined as the center point of the maximally stable region over a certion threshold value so that we can choose the space on the objects.
The stable region is assumed an ellipse in shape for ease of computation. Since I used the same local descriptor, the points near the image edges were suppressed.
MSER takes apporoximately the center point of a stable region as an interest point. Therefore, the current feature descriptor which uses adjacent fixels may have a lower matching accuracy as shown below.
Results

Interest points with elliptical stable regions on Notre Dame images by MSER |
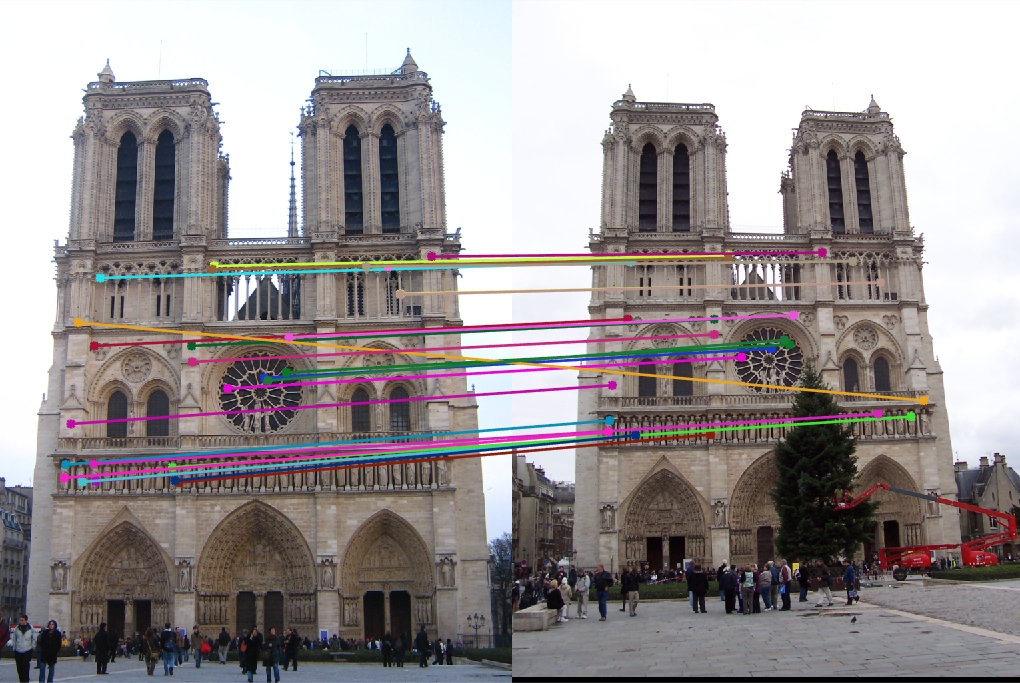
Notre Dame via MSER: 19/26, 73% accuracy |
[1] Matas, Jiri, et al. "Robust wide-baseline stereo from maximally stable extremal regions." Image and vision computing 22.10 (2004): 761-767.