Project 2: Local Feature Matching
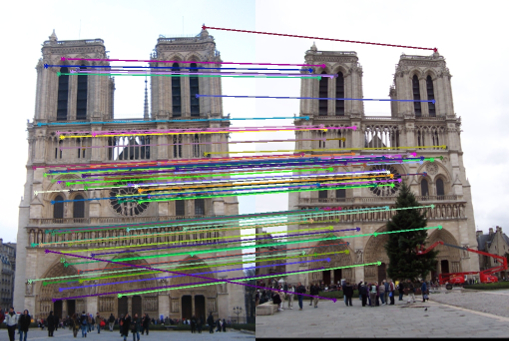
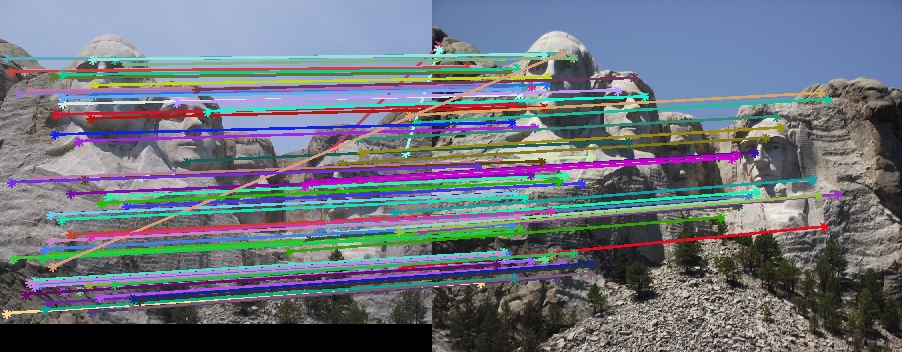
Example of SIFT feature matching.
The goal of this assignment is to create a local feature matching algorithm using techniques described in Szeliski chapter 4.1. The pipeline we suggest is a simplified version of the famous SIFT pipeline. The matching pipeline is intended to work for instance-level matching -- multiple views of the same physical scene. There are three cores for this assignment
- Interest point detector,
- Local feature descriptor, and
- Feature matching
In addition to these minimum requirement for the assignment, the author worked on the following extra credits:
- up to 5 pts: Try detecting keypoints at multiple scales or using a scale selection method to pick the best scale.
- up to 5 pts: Likewise, if you are detecting keypoints at multiple scales, you should build the features at the corresponding scales. Also, this extra credit may apply
- up to 3 pts: The simplest thing to do is to experiment with the numerous SIFT parameters: how big should each feature be? How many local cells should it have? How many orientations should each histogram have? Different normalization schemes can have a significant effect, as well. Don't get lost in parameter tuning, though.
Image Pyramid
The easiest way to deal with a scaling issue is to utilize image pyramids. We have multiple ways to building an image pyramid such as the Gaussian and Laplacian pyramids. Laplacian pyramids are commonly used when whe need to reconstruct an upsampled image from the pyramid. Since our evaluation function check the correctness simply by counting the pixels from the true location, the simplest downsample method is chosen. The code used to build the image pyramid is as follows:
% build an image pyramid
pyramid_scale = 0.75;
% set this to one to see the non-scale-invariant version
pyramid_num = 7;
image_tmp = image1_bw;
image1_pyramids = cell(pyramid_num);
for i = 1:pyramid_num
image1_pyramids{i} = image_tmp;
image_tmp = imresize(image_tmp, pyramid_scale, 'bilinear');
end
image_tmp = image2_bw;
image2_pyramids = cell(pyramid_num);
for i = 1:pyramid_num
image2_pyramids{i} = image_tmp;
image_tmp = imresize(image_tmp, pyramid_scale, 'bilinear');
end
This image pyramid is used to find interest points, to obtain feature descriptors, and to compute feature matching; thus, the implementation is relatively robust to the scale variance. The results are discussed in the last section.
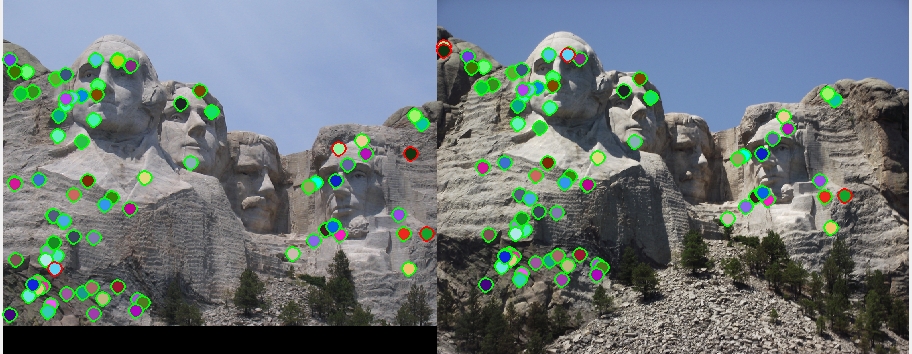
Corner Harris to find interest points
Typically, the SIFT features are computed around some interest points. When we use the dense SIFT, this is not always the case, but the implementation here uses the interest points extracted by the corner harris for the computation of the feature descriptors. The first step of the corner Harris is to compute the derivatives in both the x (width) and y (height) direction.
% compute derivatives
image = image_pyramids{pyramid};
g_deriv_x = fspecial('sobel');
g_deriv_y = g_deriv_x';
Ix = imfilter(image, g_deriv_x);
Iy = imfilter(image, g_deriv_y);
Ixx = Ix.^2;
Iyy = Iy.^2;
Ixy = Ix.*Iy;
After applying the Gaussian blurring, the cornerness function is computed as follows:
% compute cornerness
har = (Ixx .* Iyy - Ixy .^ 2 - alpha * ((Ixx + Iyy) .^ 2));
reduce_mean = 0.1;
har = har .* (har > reduce_mean * (mean(mean(har))));
maxCheck = colfilt(har, [feature_width, feature_width], 'sliding', @max);
har = har .* ((har == maxCheck));
cornerThreshold = 1e-4;
[y, x, confidence] = find(har > cornerThreshold);
This operation is conducted with each image of the image pyramids, and all the corners that pass the above thresholds are stored with their scales.
ys(end+1:end+size(y, 1), 1) = y;
xs(end+1:end+size(x, 1), 1) = x;
confidences(end+1:end+size(confidence, 1), 1) = confidence;
scales(end+1:end+size(y, 1), 1) = scale;
Ys(end+1:end+size(ys, 1), 1) = ys;
Xs(end+1:end+size(xs, 1), 1) = xs;
Confidences(end+1:end+size(confidences, 1), 1) = confidences;
Scales(end+1:end+size(scales, 1)) = scales;
Pyramids(end+1:end+size(ys, 1), 1) = pyramid;
Feature descriptors
A scale invariant feature transform (SIFT) feature is computed around each of the interest points extracted by the above corner Harris method. The implementation allows a various widths of the features, but the bin size and the direction size are fixed to 4 x 4 and 8 directions, respectively. This means that each feature descriptor has 128 dimensions because each of the bin box stores 8 directions (4 x 4 x 8 = 128). What a feature descriptor stores is a histgram of the gradient orientation. For the corner location [x(i), y(i)], the correspoinding orientations can be computed in the following way:
region_size = feature_width / 2;
range_x = (x(i) - region_size):(x(i) + region_size - 1);
range_y = (y(i) - region_size):(y(i) + region_size - 1);
size_range_x = size(range_x, 2);
size_range_y = size(range_y, 2);
orientations_feature = zeros(size_range_x, size_range_y);
for j = 1:size_range_x
for k = 1:size_range_y
x_fd = Ix(range_y(j), range_x(k)); % x first derivative
y_fd = Iy(range_y(j), range_x(k)); % y first derivative
orientations_feature(j, k) = floor(atan2(y_fd, x_fd) / (pi / 4)) + 4;
end
end
Also, the magnitude of the gradient is computed as follows:
mags = sqrt(abs(Ix).^2 + abs(Iy).^2);
The magnitude is downweighted by a Gaussian fall-off function beucase the influence of the gradient far from the interest point should be reduced. At this point, the magnitudes and orientations are stored in the box whose sizes are feature_width by featire_width. In order to compute the histgram in the 4 b 4 bins, the magnitudes and orientations are reshaped into 16 matrices, each of which corresponds to each of the bins.
% reshape 16 x 16 matrix into smaller submatrices
bin_num = 16;
bin_row = sqrt(bin_num);
bin_col = sqrt(bin_num);
bin_width = feature_width / bin_row;
bin_height = bin_width;
current_bin = 1;
orientations_r = zeros(bin_width, bin_height, bin_num);
mag_r = zeros(bin_width, bin_height, bin_num);
for j = 0:bin_row-1
for k = 0:bin_col-1
orientations_r(:, :, current_bin) = orientations_feature(j * bin_height + 1:(j+1)...
* bin_height, k * bin_width + 1:(k+1) * bin_width);
mag_r(:, :, current_bin) = feature_mags(j * bin_height + 1:(j+1) * bin_height,...
k * bin_width + 1:(k+1) * bin_width);
current_bin = current_bin + 1;
end
end
Finally, the normalized histgram makes one feature descriptor as follows.
% build histogram
% each feature has 128 dimensions and it stores the feature of the
% submatrix in the following order
% [topleft mat dir1, topleft mat dir2, dir3, ... topright mat dir1,
% dir 2, ... bottom right mat dir1, dir2, ... dir 8]
for current_bin = 1:bin_num
for orientation = 1:8
% note orientation is stored from 0 to 7
[pos_x, pos_y] = find(orientations_r(:, :, current_bin) == (orientation - 1));
num_found_orientation = size(pos_x);
magnitude_sum = 0;
for j = 1:num_found_orientation
magnitude_sum = magnitude_sum + mag_r(pos_x(j), pos_y(j), current_bin);
end
features(i, 8 * (current_bin - 1) + orientation) = magnitude_sum;
end
end
norm_feature = norm(features(i, :));
if(isfinite(norm_feature))
features(i, :) = features(i, :)./norm_feature;
else
fprintf('feature %d norm is not finite\n', i);
end
Matching points by Ratio Test
The matchmaker first compares the number of the feature descriptors from two images, and the smaller number of the two pairs are outputed from the matchmaker. The algorithm computes the Euclidean distance of the two features and searches the closest and the second closest feature for each. When the ratio of the first closest distance to the second surpasses the threshold, the feature pair is stored as a candidate for the evaluation. Also, the reciprocal of the ratio is used as a confidence; thus, the smaller the ratio, the better matching. This operation is done for all the features, and the features with the best 100 confidences are used for the evaluation. The codes used for the matching is shown below:
if(size(features1, 1) <= size(features2, 1))
features_s = features1;
features_l = features2;
else
features_s = features2;
features_l = features1;
end
BIG = 1e16;
num_features = size(features_s, 1);
used = zeros(size(features_l, 1));
matches = [];
confidences = [];
% Look at P.230 of the textbook
for i = 1:num_features
firstClosestDis = BIG;
secondClosestDis = BIG;
firstClosest = -1;
secondClosest = -1;
current_feature = features_s(i, :);
for j = 1:size(features_l, 1)
dis = norm(current_feature - features_l(j, :));
if(dis < firstClosestDis && used(j) == false)
secondClosest = firstClosest;
firstClosest = j;
secondClosestDis = firstClosestDis;
firstClosestDis = dis;
end
end
nn = firstClosestDis / secondClosestDis;
pairNow = [i firstClosest];
nearestNeighborThreshold = 1.0;
if(nn < nearestNeighborThreshold)
confidences(end + 1, 1) = 1.0/nn;
matches(end+1, :) = pairNow;
used(firstClosest) = true;
end
end
if(size(features1, 1) > size(features2, 1))
matches = fliplr(matches);
end
[confidences, ind] = sort(confidences, 'descend');
matches = matches(ind, :);
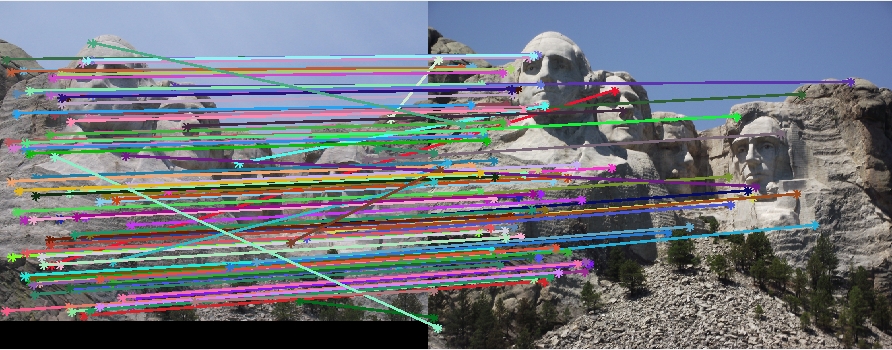
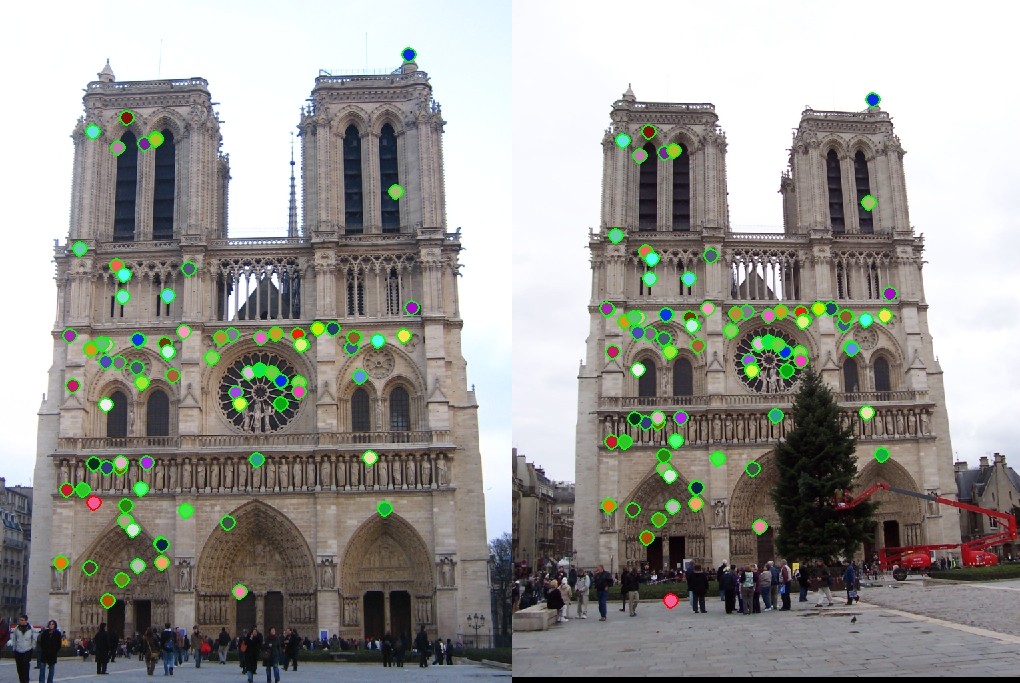
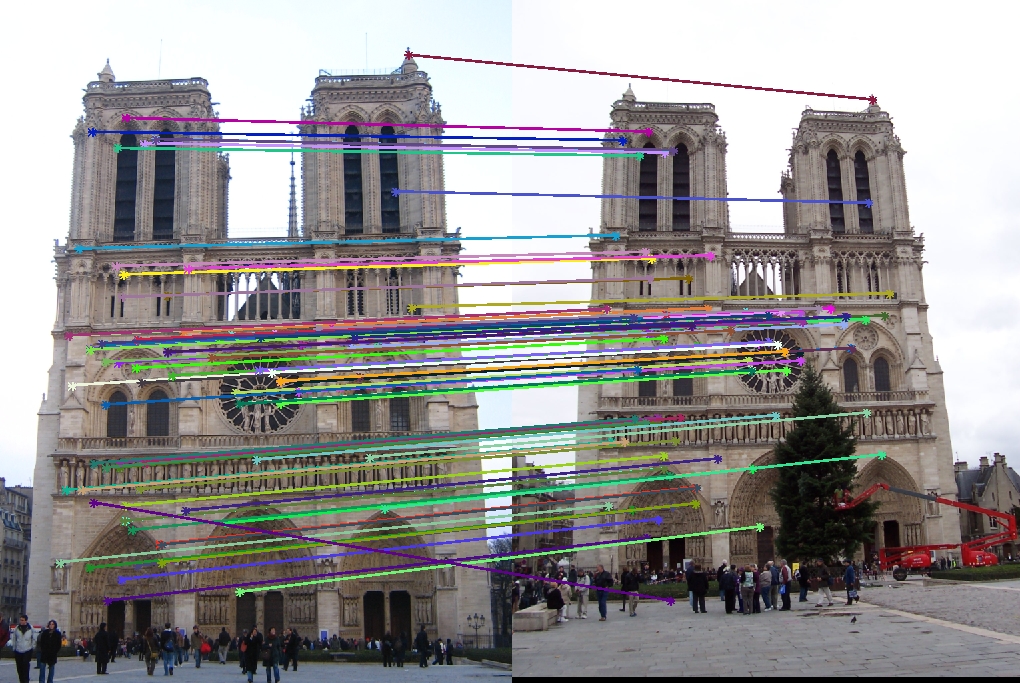
Results
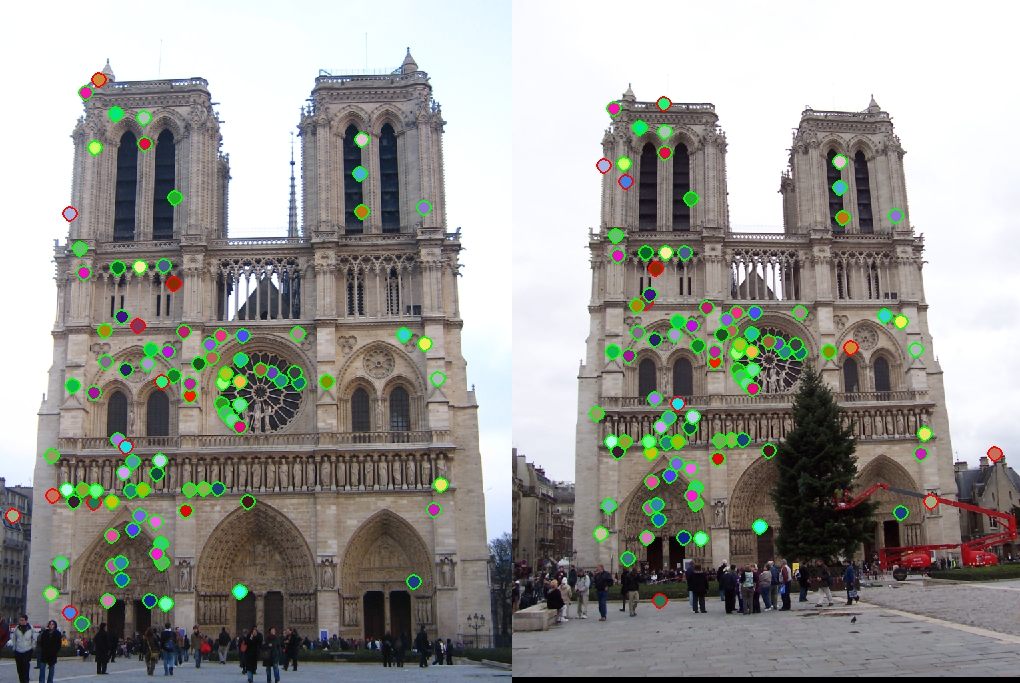
First, the figures below show the results with one layer of the image pyramids.
|
|
|
|

|
|
scale_factor = 0.5;
image1 = imresize(image1, scale_factor, 'bilinear');
image2 = imresize(image2, scale_factor, 'bilinear');
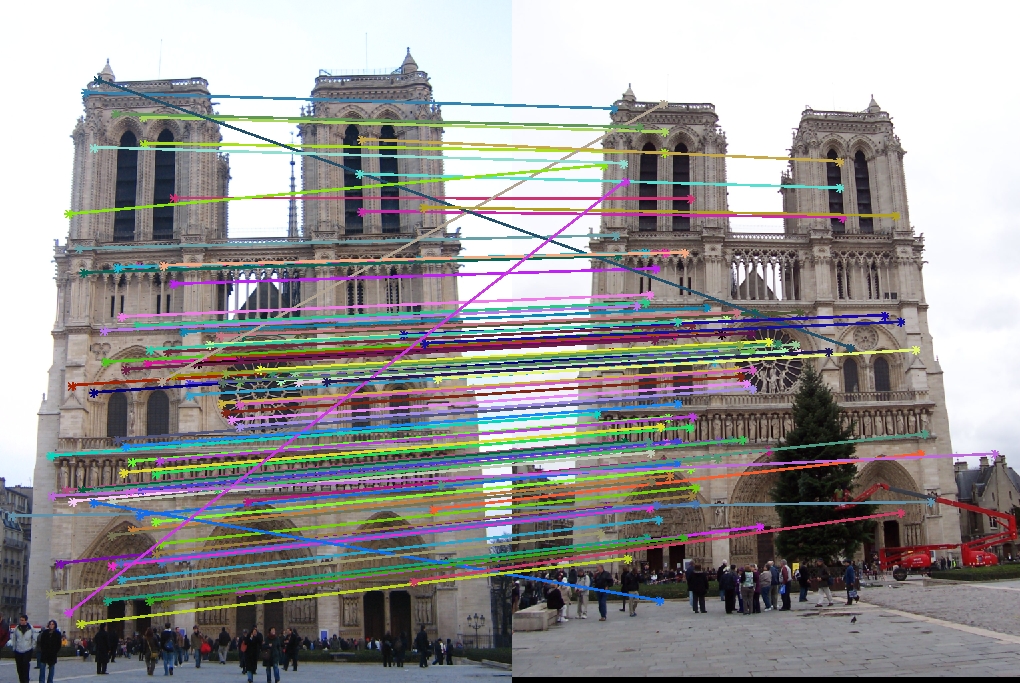
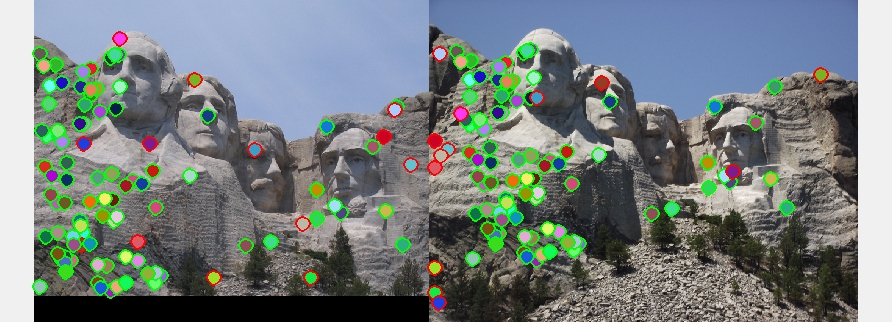
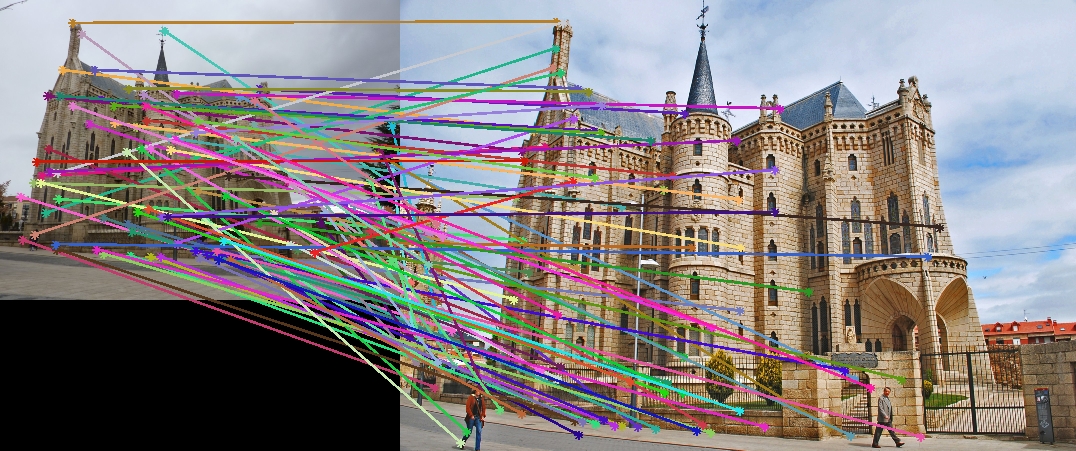
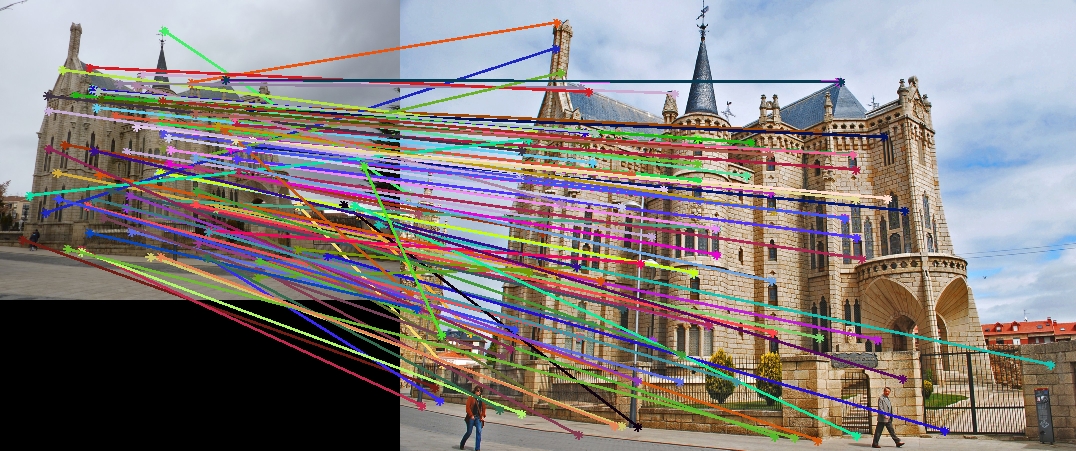
You can test the one-layer version simply by setting the parameter 'pyramid_num' in proj2.m to one. The results with the Nortre Dame and Mount Rushmore are already satisfactory, 90% and 87% correct. However, the results with the Episcopal Gaudi was very poor, and it showed only 8% correct. Apparently, the resolutions of the figures of the Episcopal Gaudi are a lot different between the pair. Since the same feature widths were used for both the images, a corner found at one image may not be found in the other. Also, the SIFT features are not perfectly scale invariant. These problems are mitigated by using the image pyramids. The figures below show the results with the image pyramids.
|
|
|
|

|
|
| Scale | Layers | |
| Nortre Dame | 0.85 | 5 |
| Mount Rushmore | 0.95 | 6 |
| Episcopal Gaudi | 0.75 | 6 |
| Witout Image Pyramids | With Image Pyramids | |
| Nortre Dame | 90 % | 99 % |
| Mount Rushmore | 87 % | 96 % |
| Episcopal Gaudi | 8 % | 44 % |