Project 3 / Camera Calibration and Fundamental Matrix Estimation with RANSAC
Part I: Camera Projection Matrix
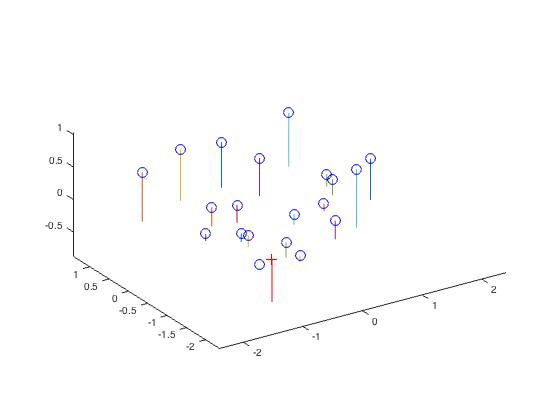
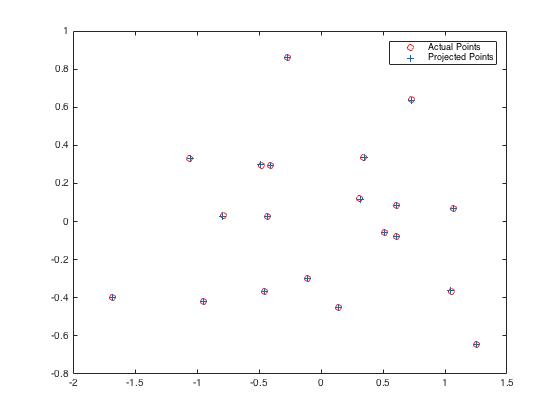
We can use the following equation to move from 3D world to 2D camera coordinates:
And the camera center can be calculated using the following equation:
The results are shown in the following images:
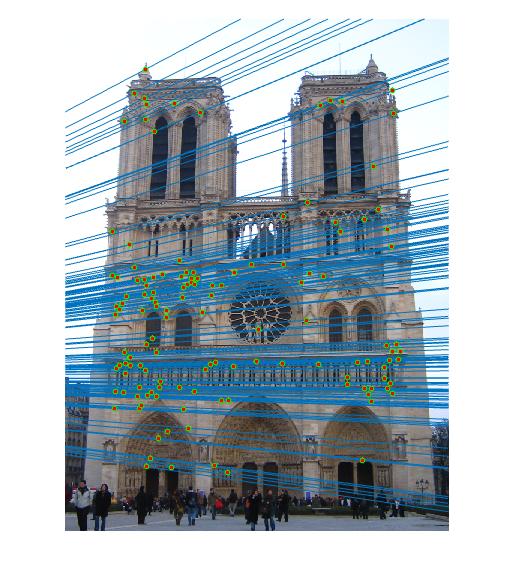
Part II: Fundamental Matrix Estimation
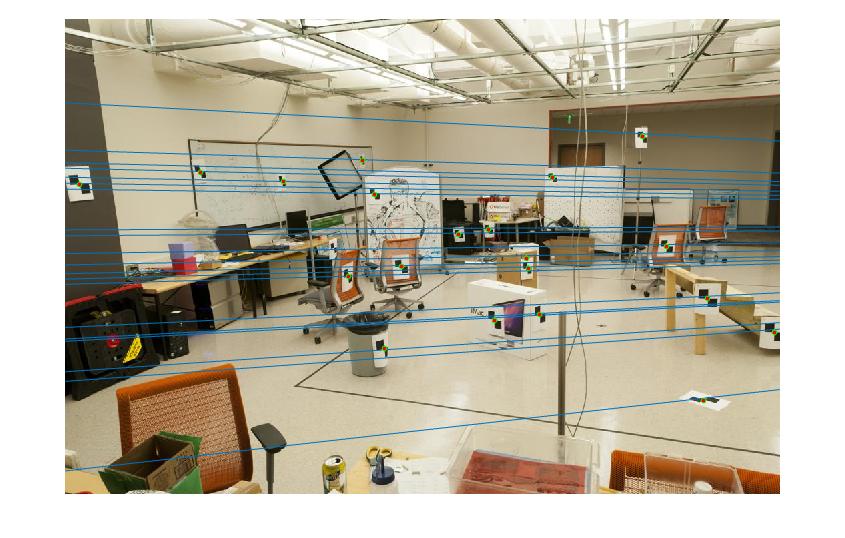
We can solve for the Fundamental matrix using the following equation:
The results (drawing epilolar line) are shown below:
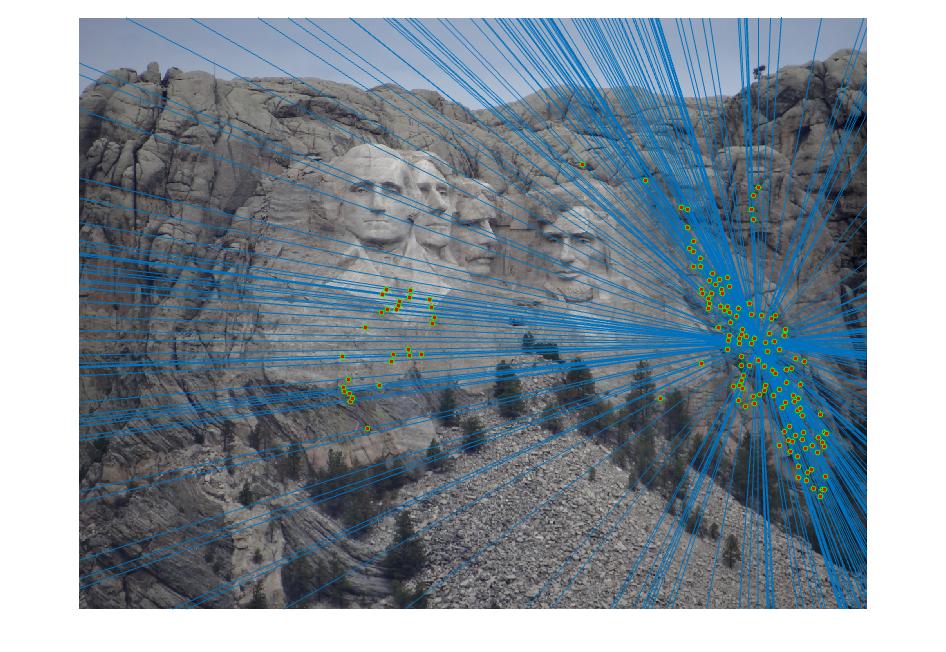
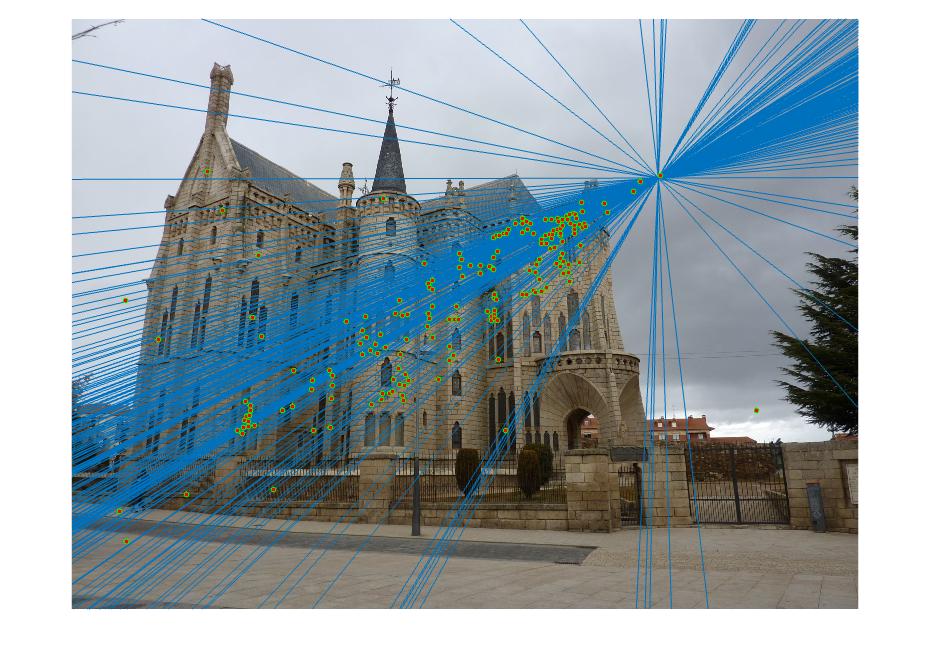
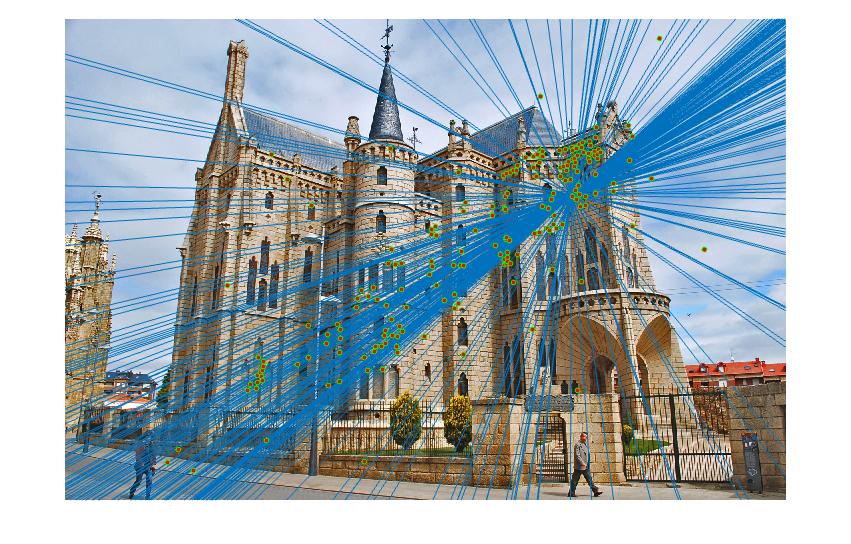
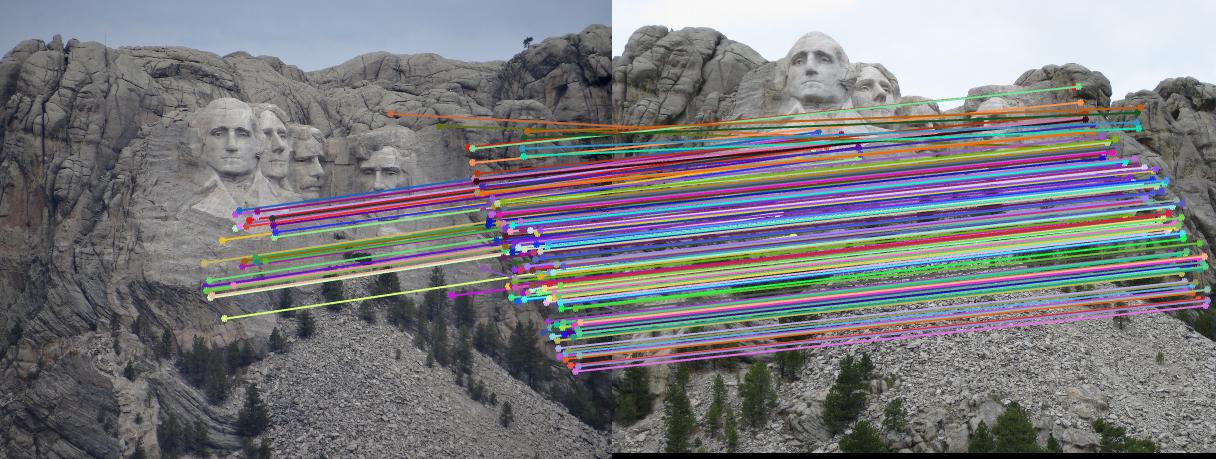
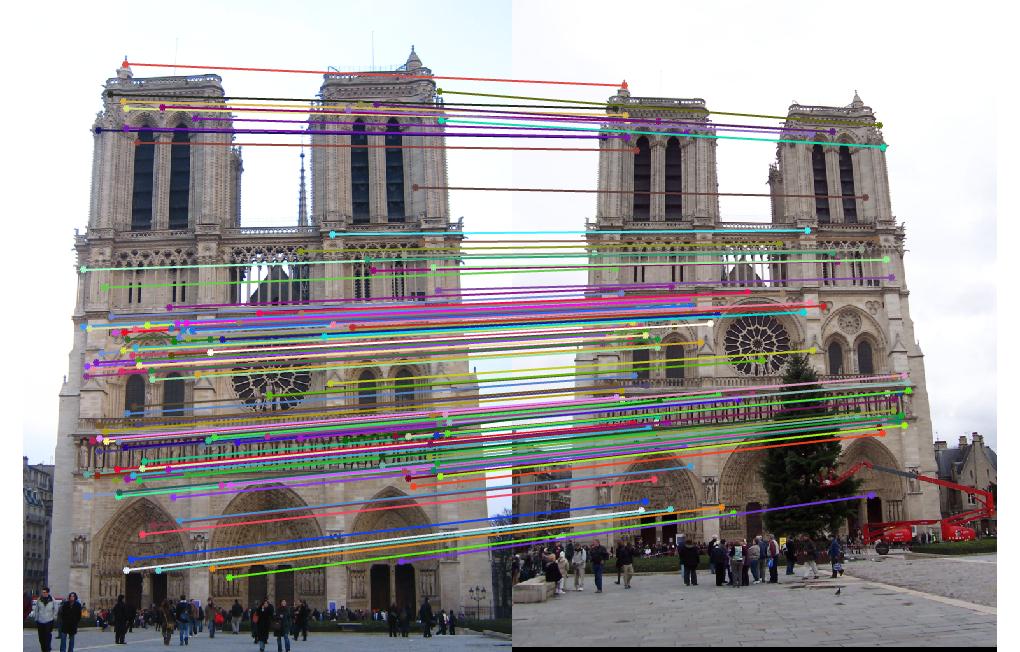
Part III: Fundamental Matrix with RANSAC
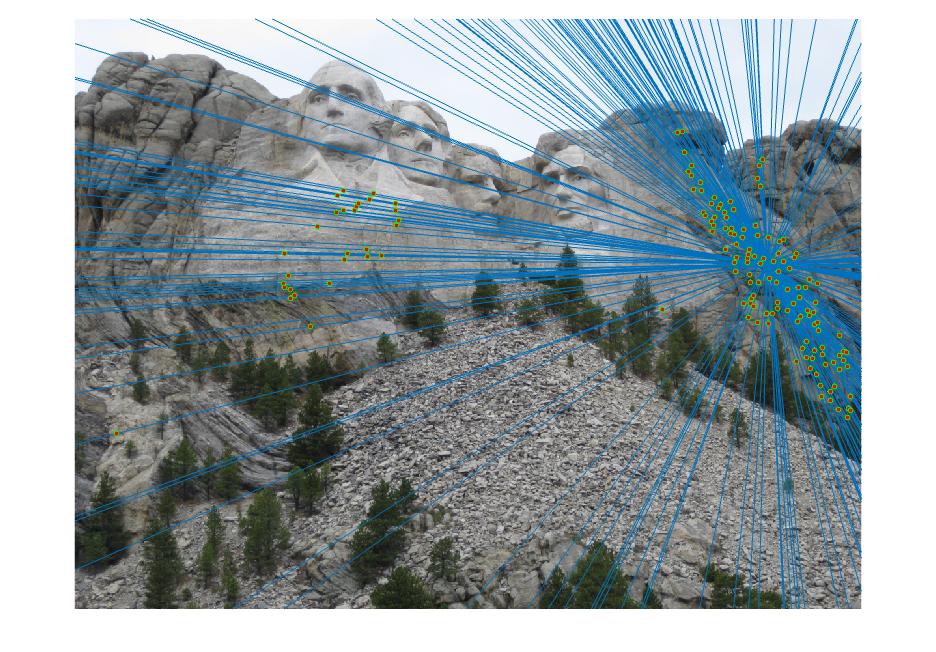
With the max iteration number set to 1000, the outlier ratio set to 0.99, and the error threshold set to 0.005, using the RANSAC algorithm, we get the following results.
Epipolar lines

|


|
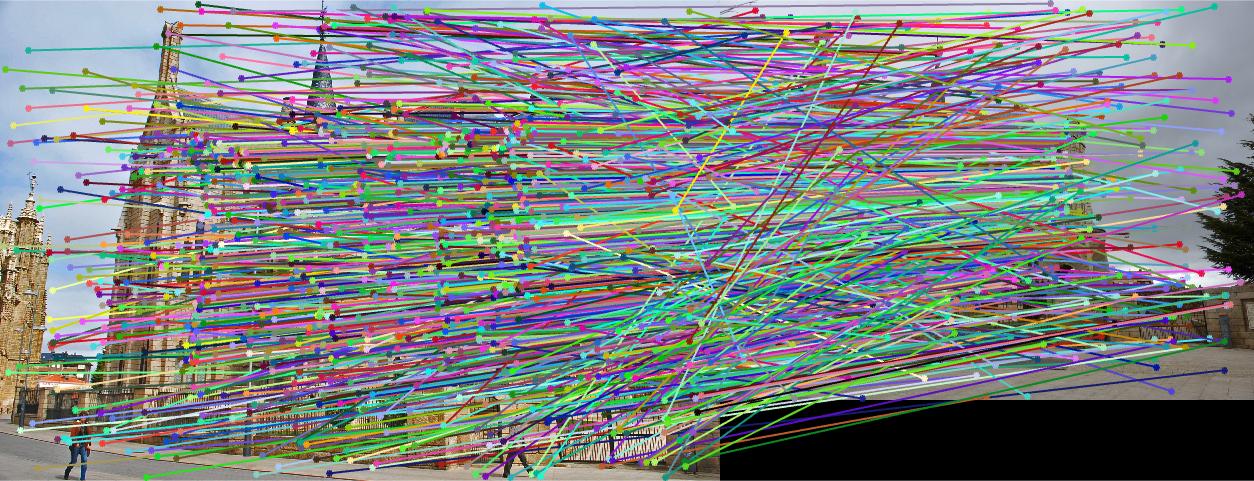
Matching features using only SIFT and using RANSAC


|



|