Project 3 / Camera Calibration and Fundamental Matrix Estimation with RANSAC
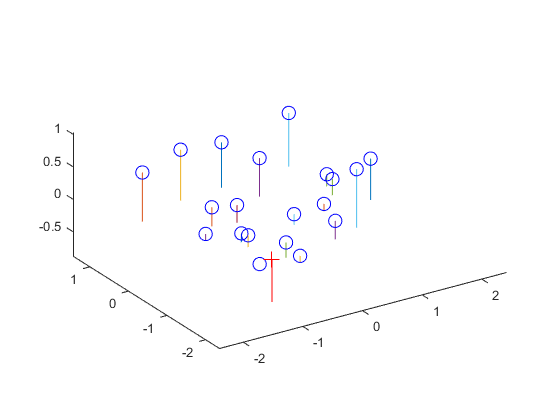
In the following two images we can see the visualization for the camera points and expected camera points as well as the predicted location of the camera
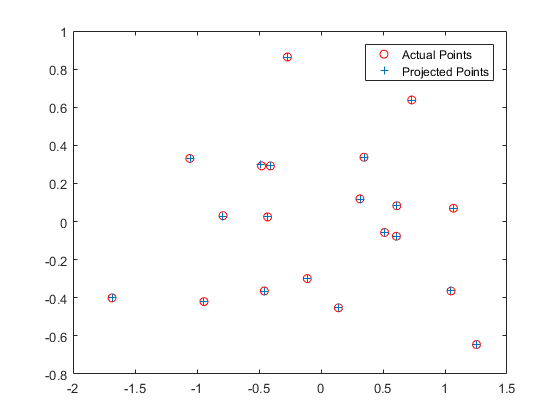
The output given is:
The projection matrix is:
-0.4583 0.2947 0.0140 -0.0040
0.0509 0.0546 0.5411 0.0524
-0.1090 -0.1783 0.0443 -0.5968
The total residual is: <0.0445>
The estimated location of camera is: <-1.5127, -2.3517, 0.2826>
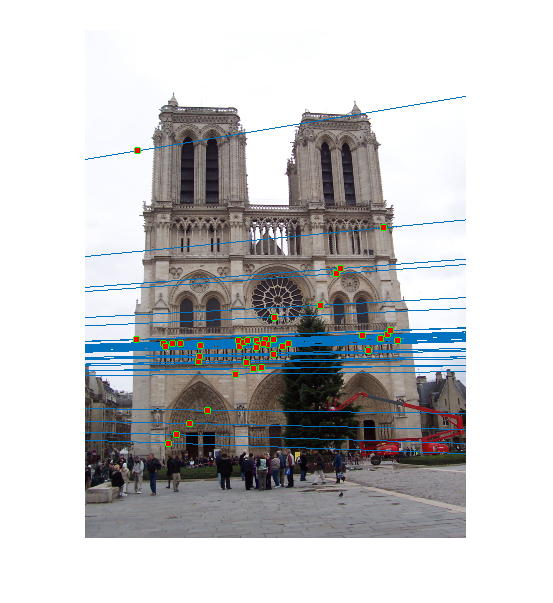
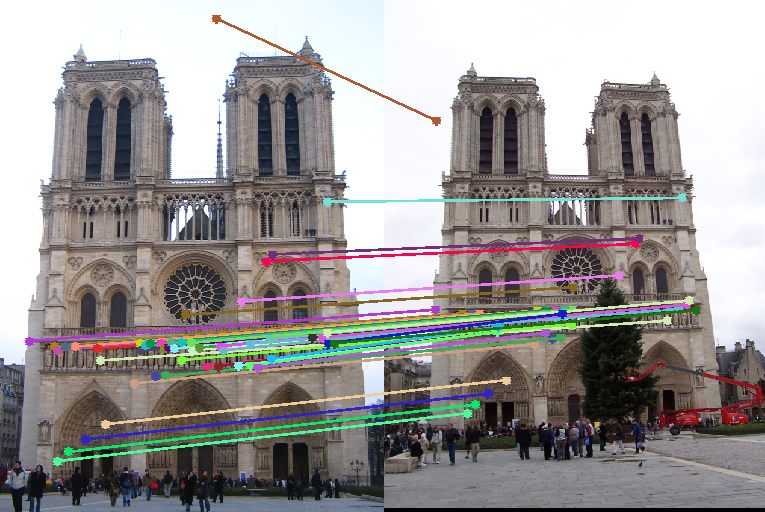
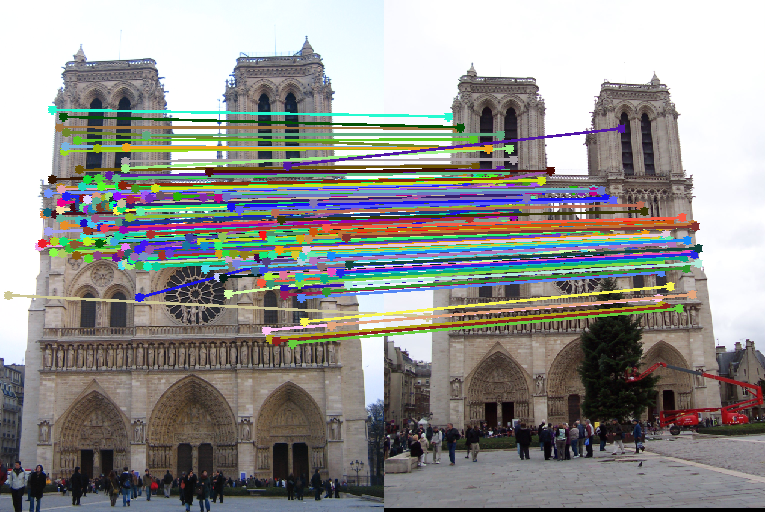
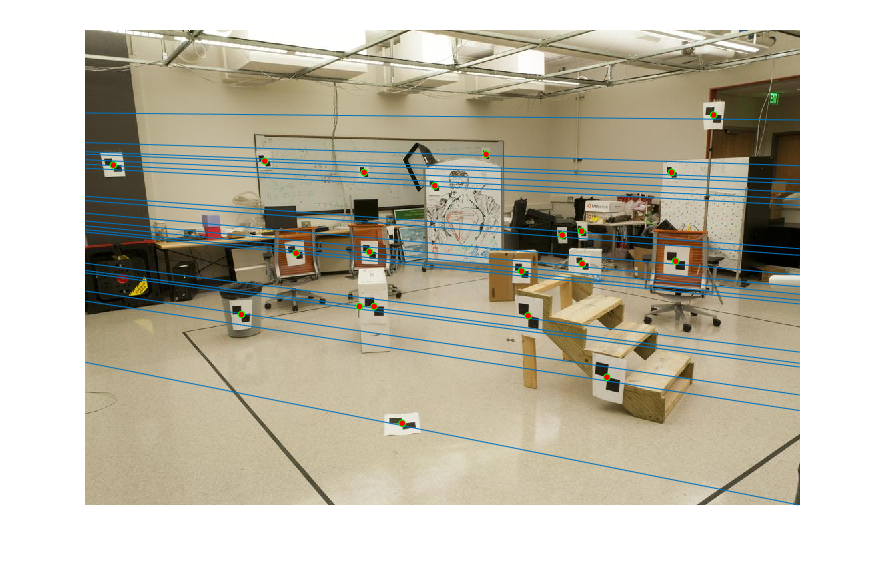
In this second group of images we can see three sets of epi polar results, The first image shows the results from a non normalized fundamental matrix, The second and third are from
attempts at creating a normalized fundamental matrix. As can be seen there is one "good" one and one "bad" one. The good one shows how it is close to the non normalized but it is actually
the bad one that works a lot better when used in conjunction with ransack so it was included here. If I had more time I would find a happy medium between the two.
The fundamental matrix found without the normalization was:
-0.0000 0.0000 -0.0019
0.0000 0.0000 0.0172
-0.0009 -0.0264 0.9995


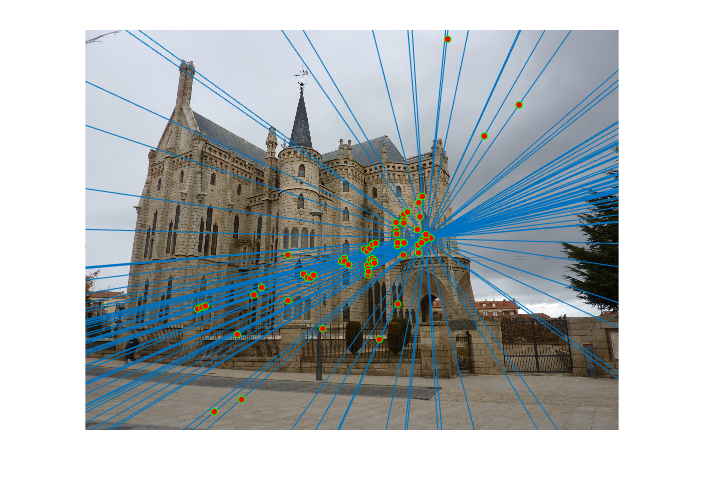
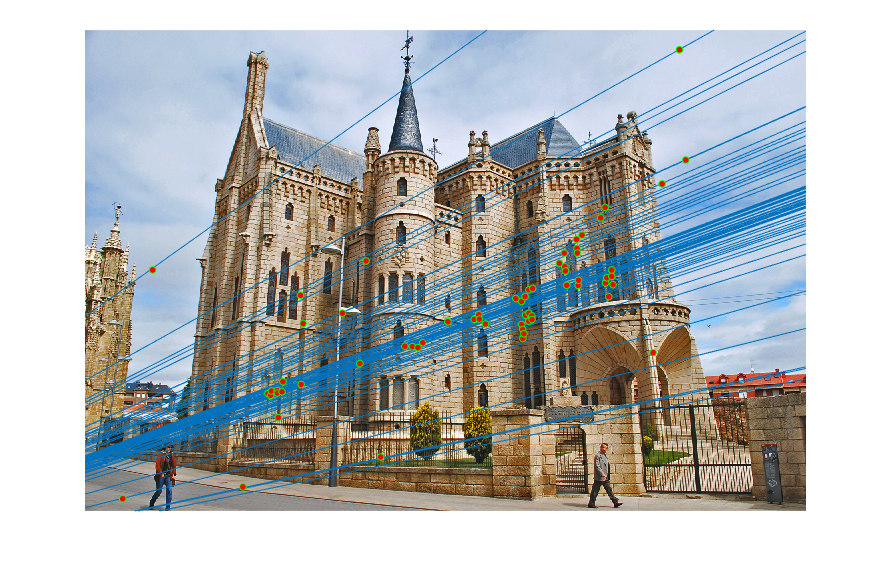
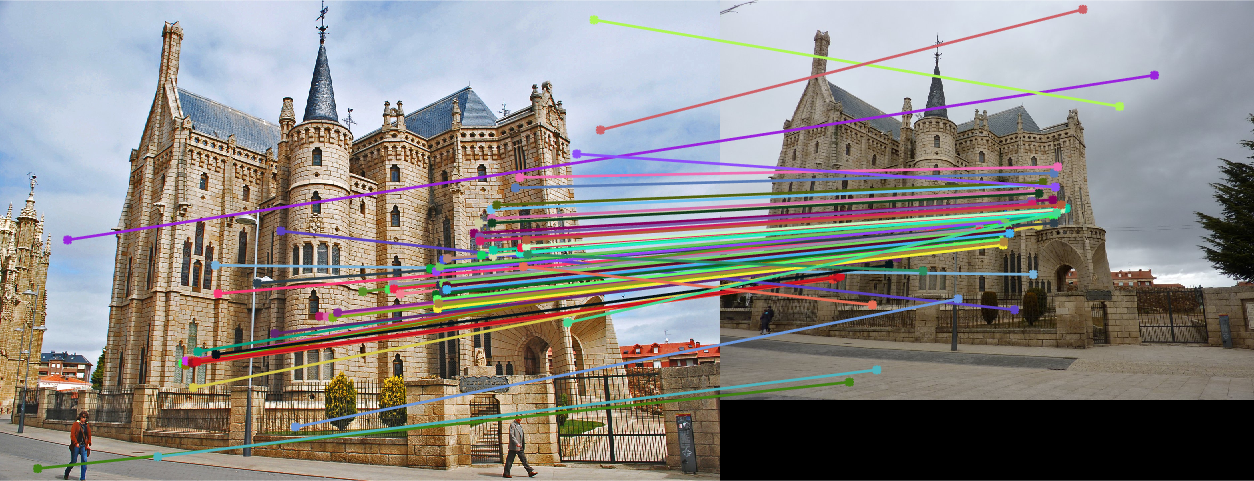
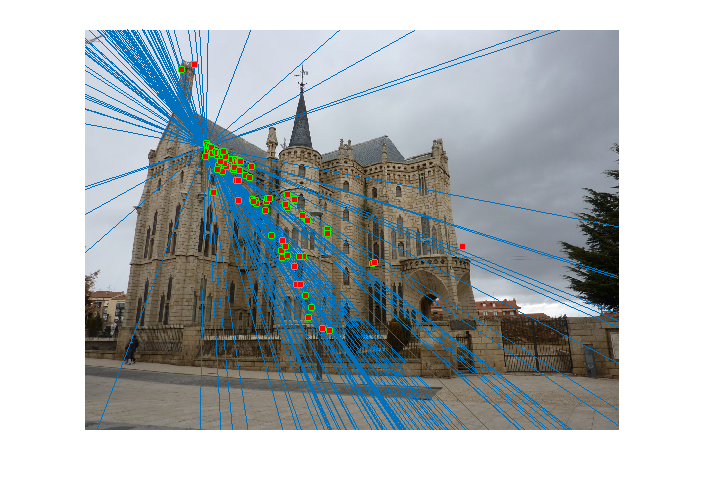
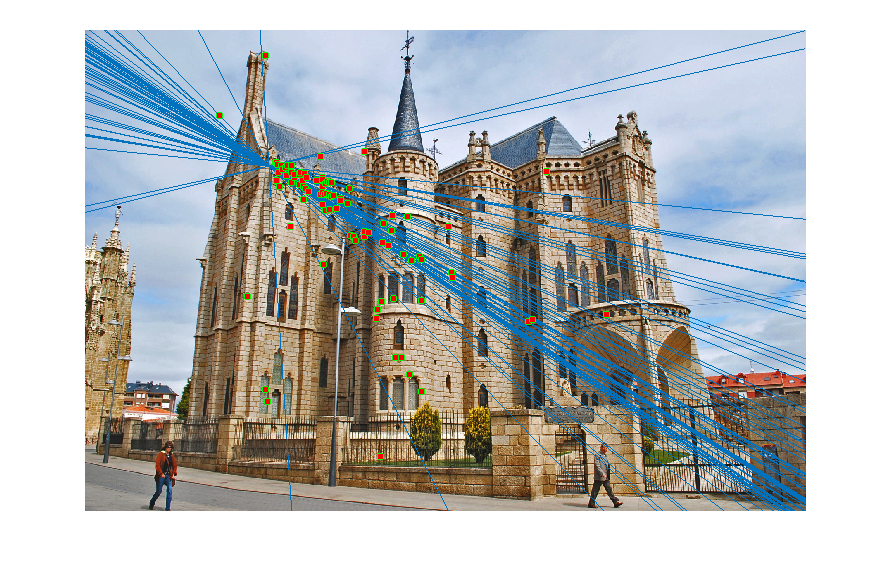
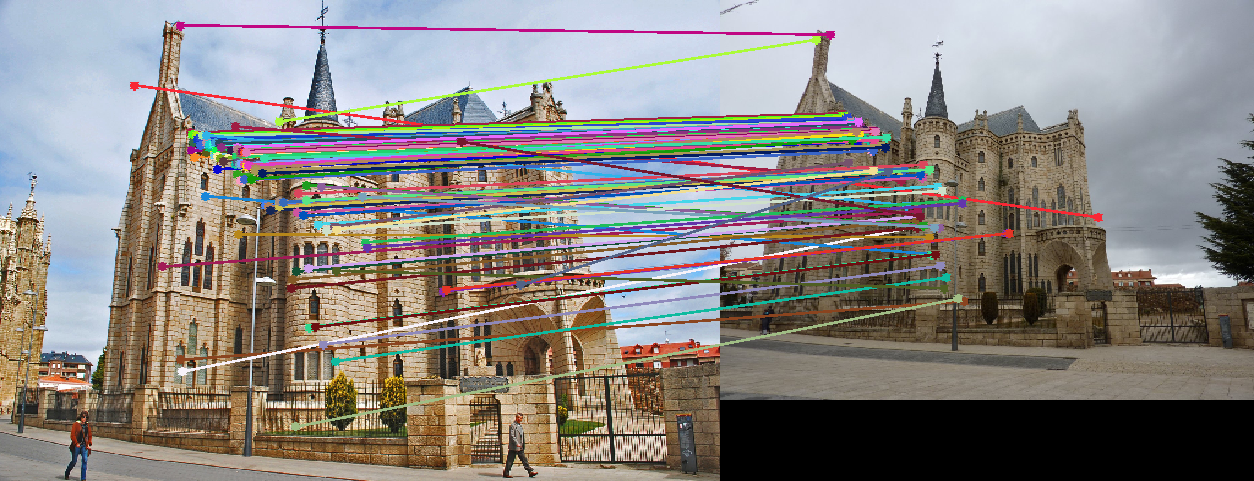
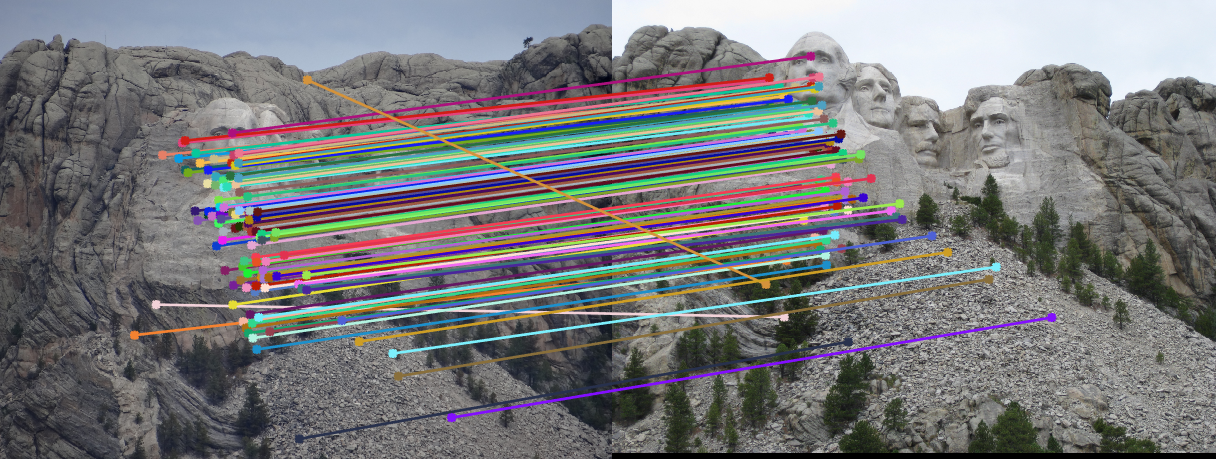
This third group of images shows the results of ransack being used on the mount rushmore dataset. The first three images are from the non normalized fundamental matrix and works pretty well. The next three after with the attempted normalized fundamental matrix. They came out really well with the accuracy of the matches but the epi polar lines might be incorrect
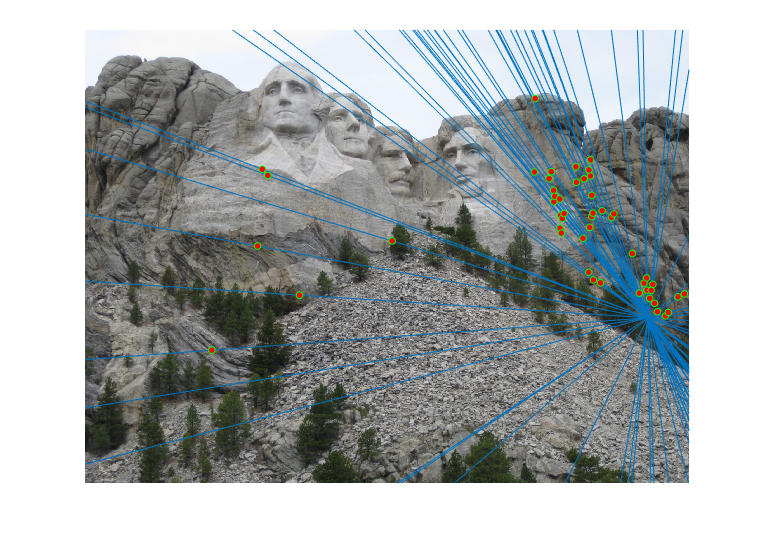

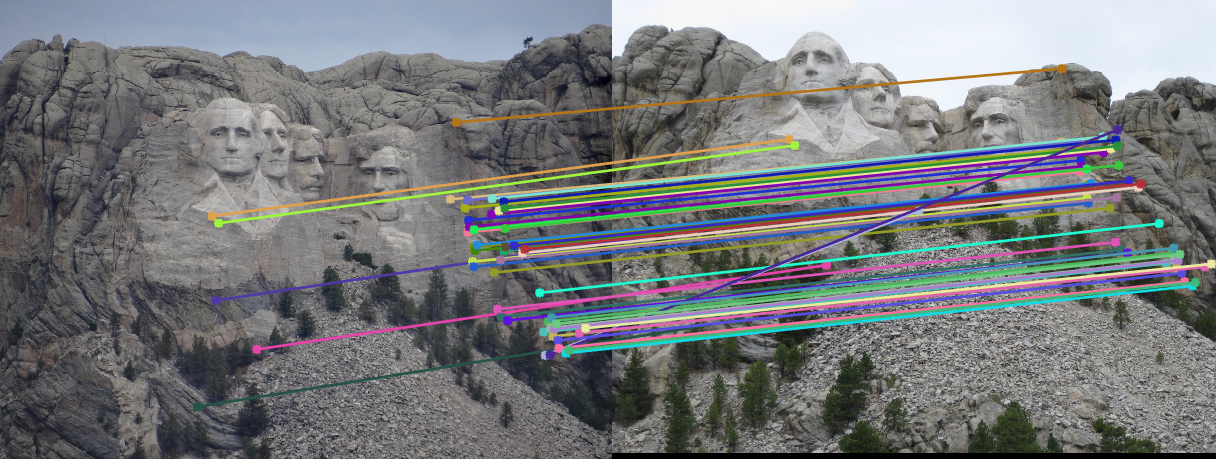
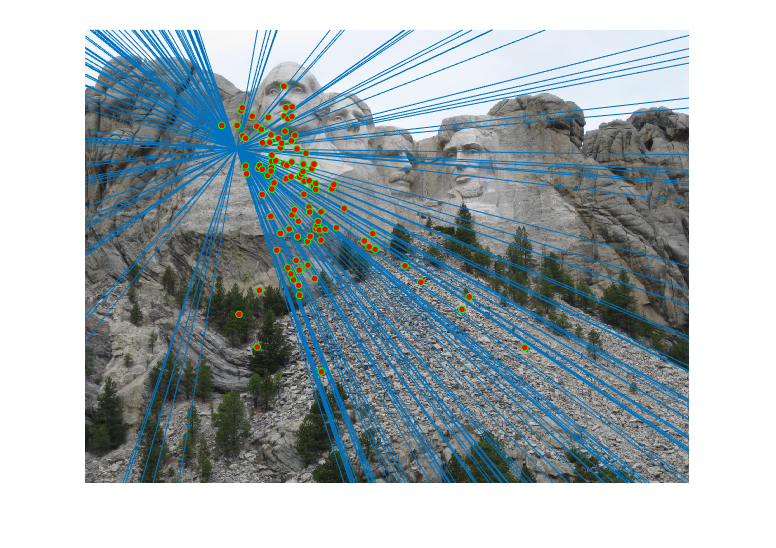
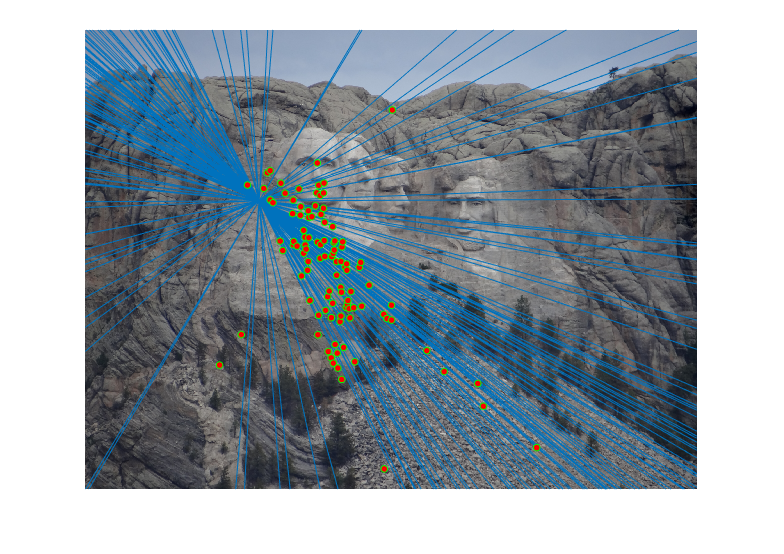
This last group of images shows a few more runs of ransack. For these images the first 3 in a set are non normalized and the other three is with my attempt at normalization (The desired amount of inliers was lowered for some of these tests)