Project 3 / Camera Calibration and Fundamental Matrix Estimation with RANSAC
In project III, I mainly solved three problems.
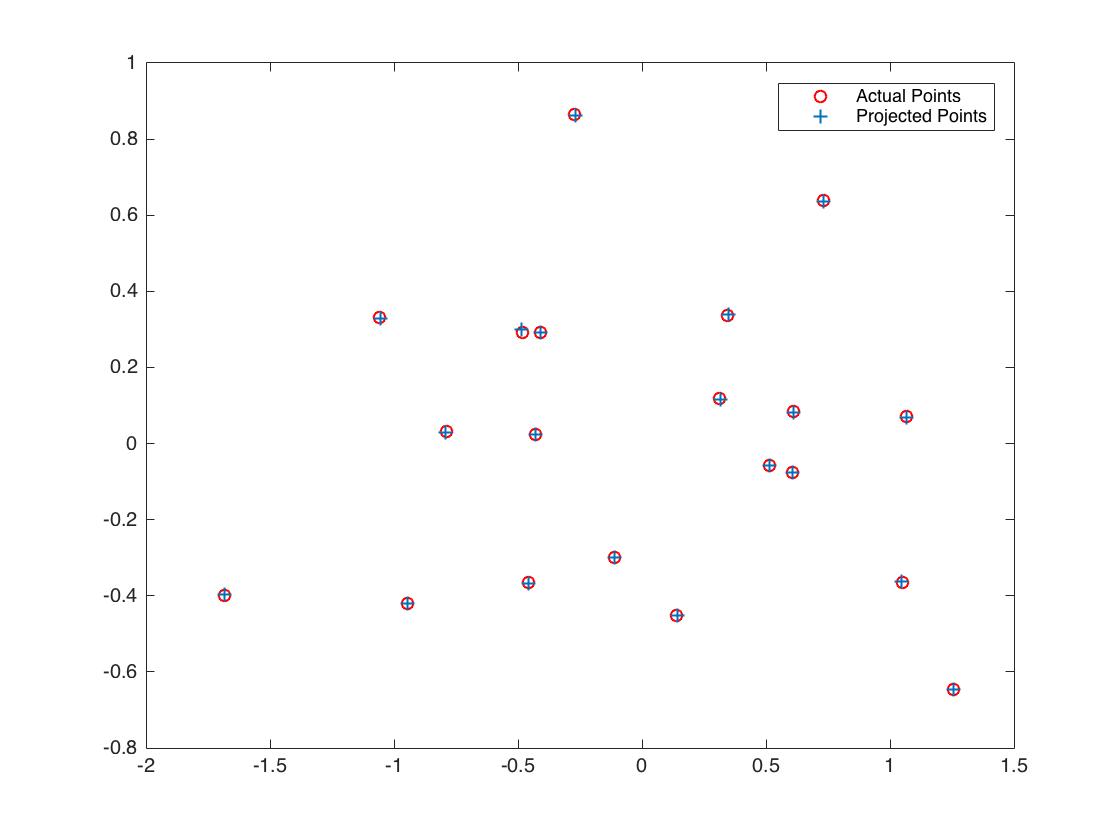
- This first is to solve the extrinsic matrix that projects 3D points to 2D points.
- The second is to solve the fundenmental matrix that coorelates the same 2D point in two different images.
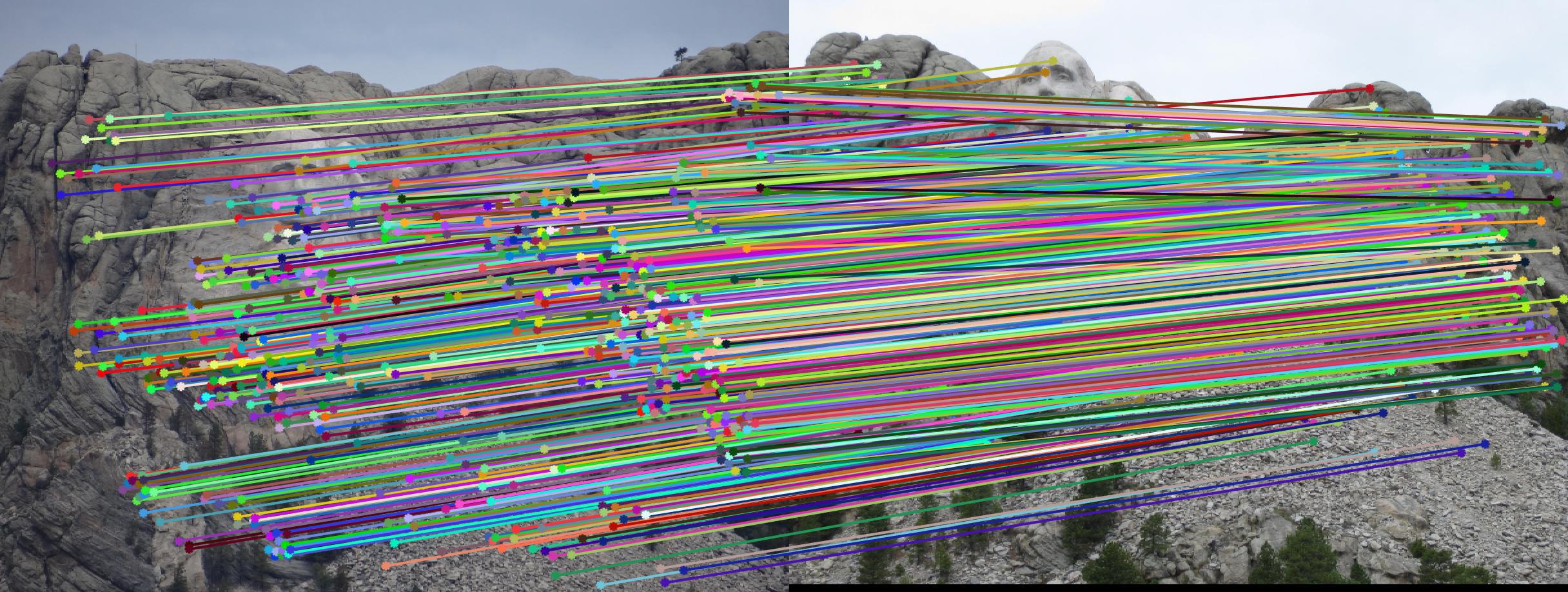
- The third is to find the best fundenmental matrix by using RANSAC and eliminate the outliers.
For all three tasks, the computation follows the guideline from the textbook, and the assignment
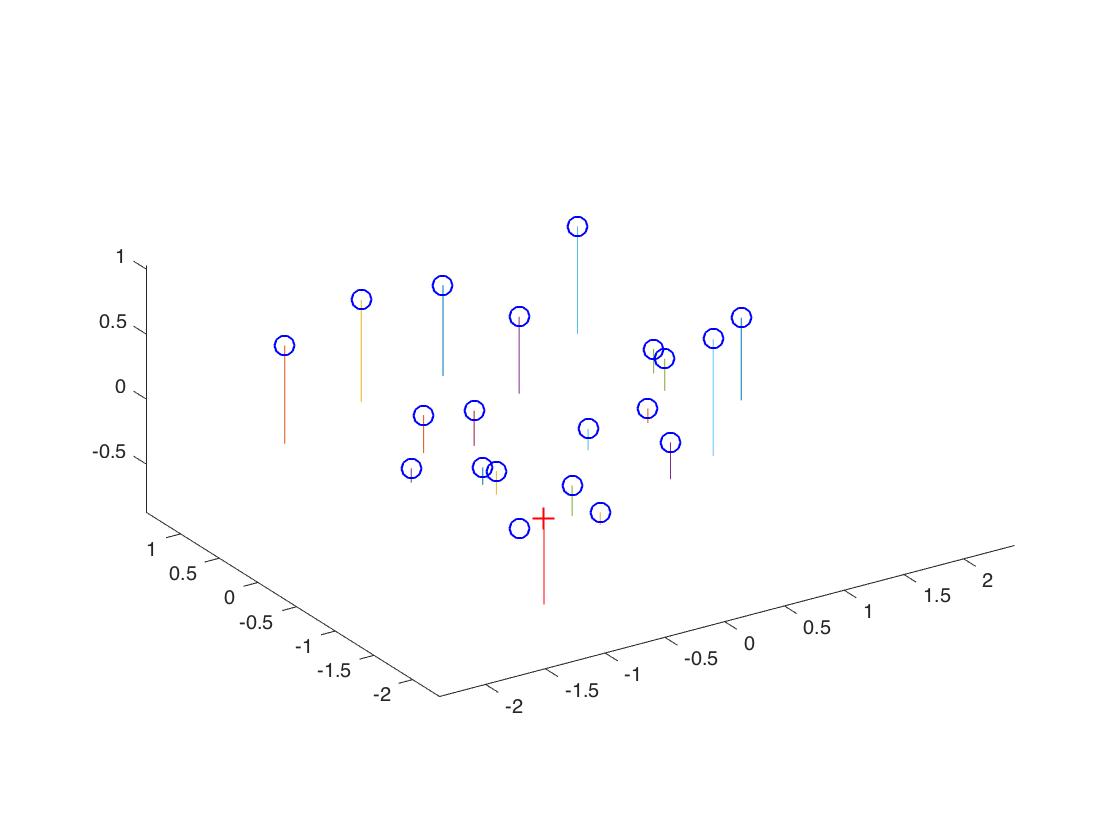
Part I: Camera Projection Matrix
The projection matrix is:
0.4583 -0.2947 -0.0140 0.0040
-0.0509 -0.0546 -0.5411 -0.0524
0.1090 0.1783 -0.0443 0.5968
The total residual is: <0.0445>
The estimated location of camera is: <-1.5127, -2.3517, 0.2826> <0.0445>
Results in a table
|
|
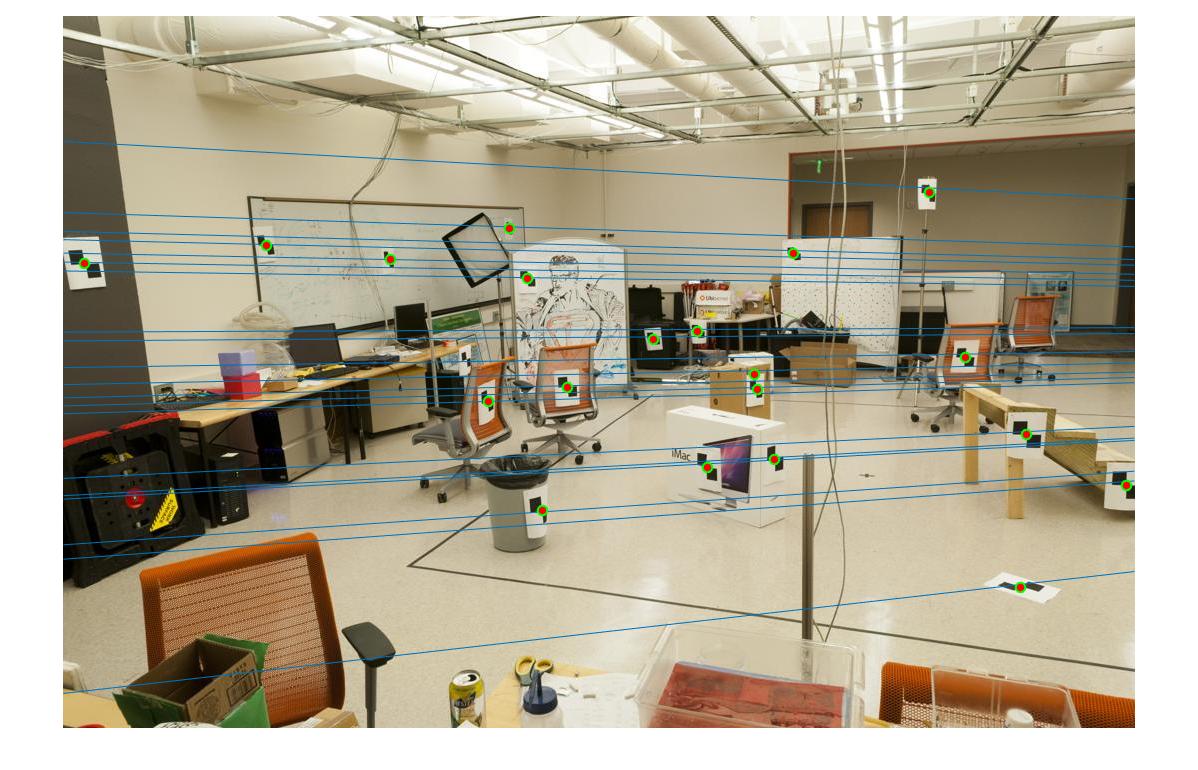
Part II: Fundamental Matrix Estimation
Estimate of the fundamental matrix for the base image pair (pic_a.jpg and pic_b.jpg)
-0.0000 0.0000 0.0019
0.0000 0.0000 0.0172
-0.0009 -0.0264 0.9995
Results in a table
|

|
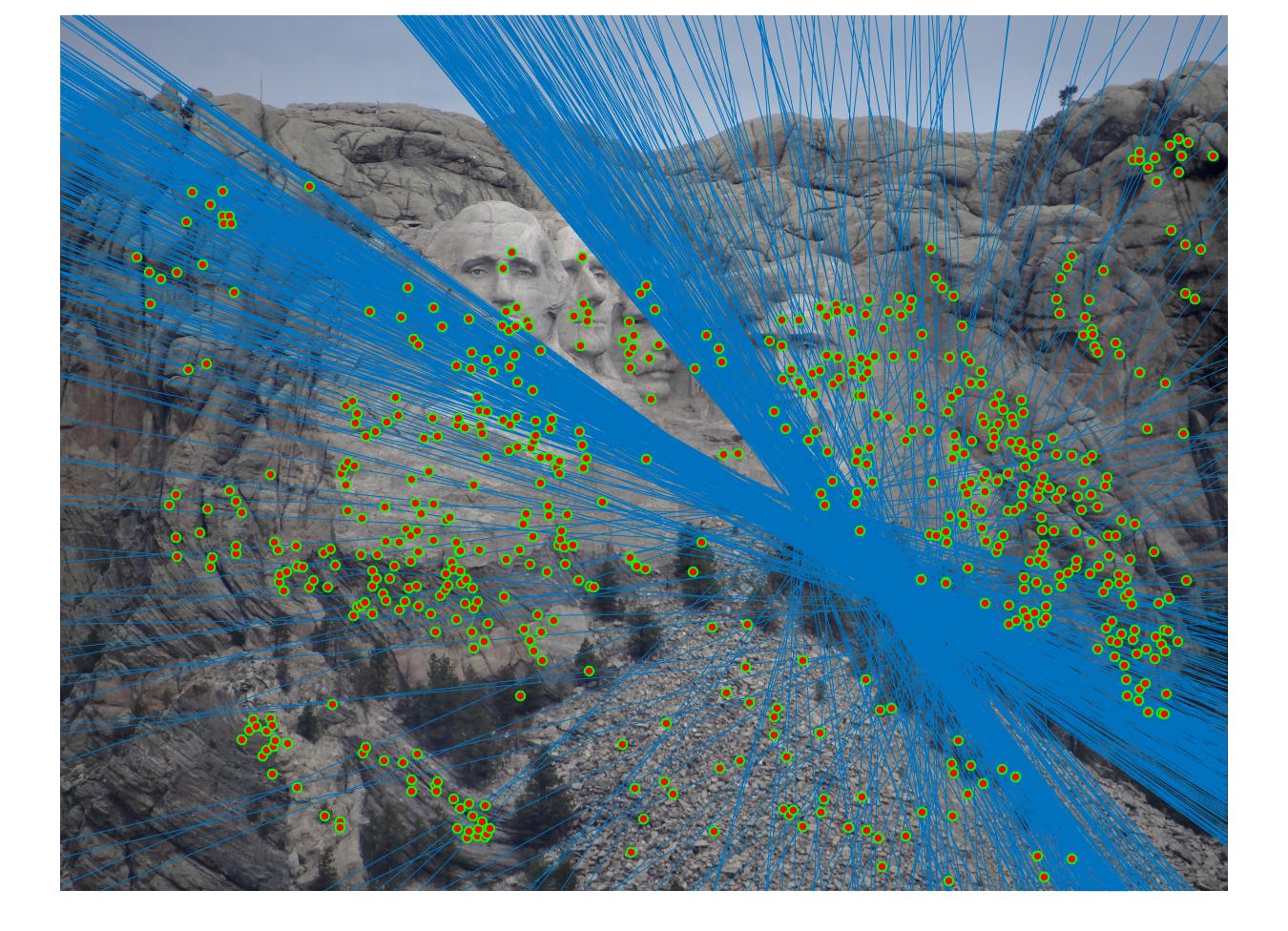
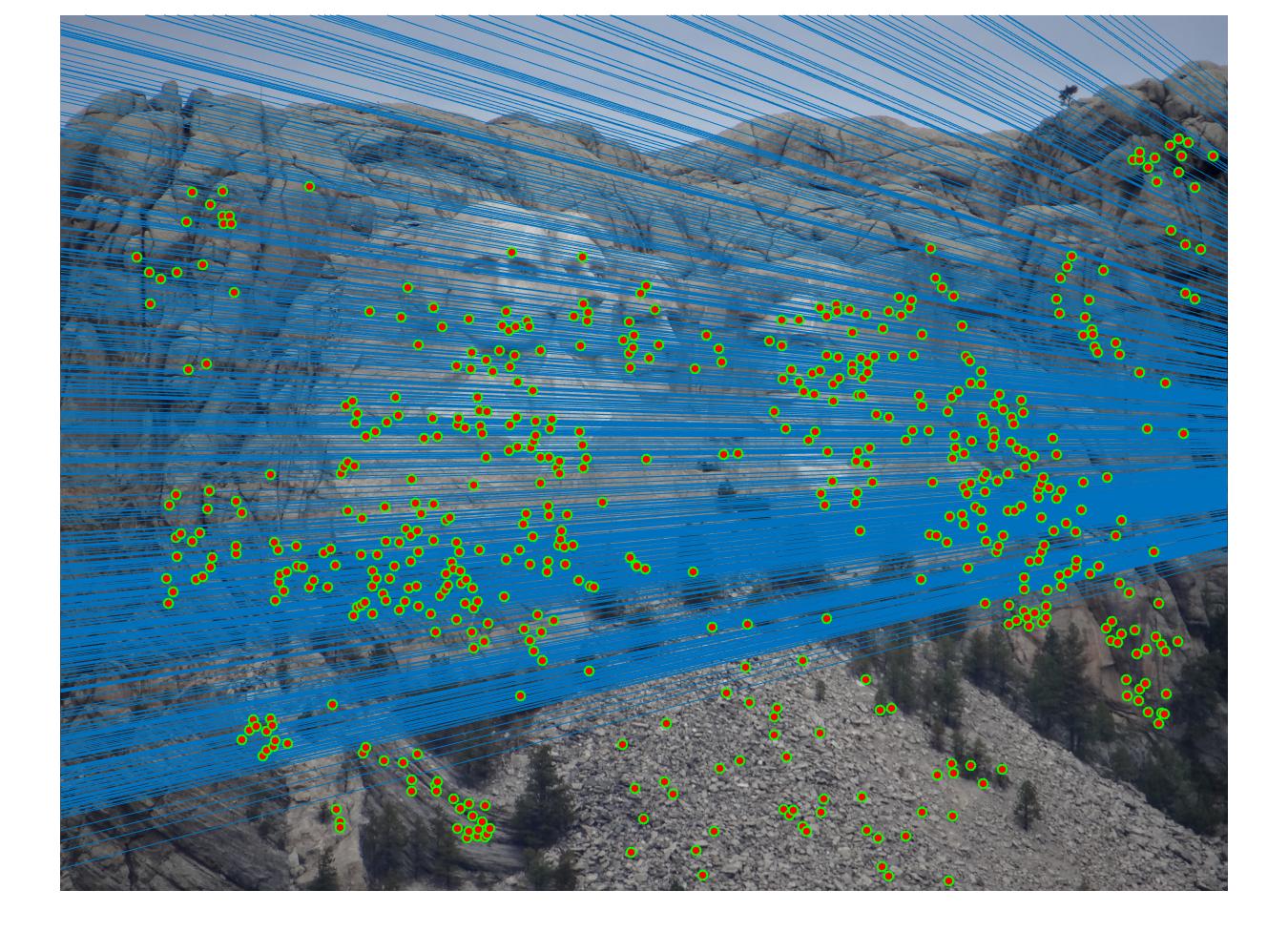
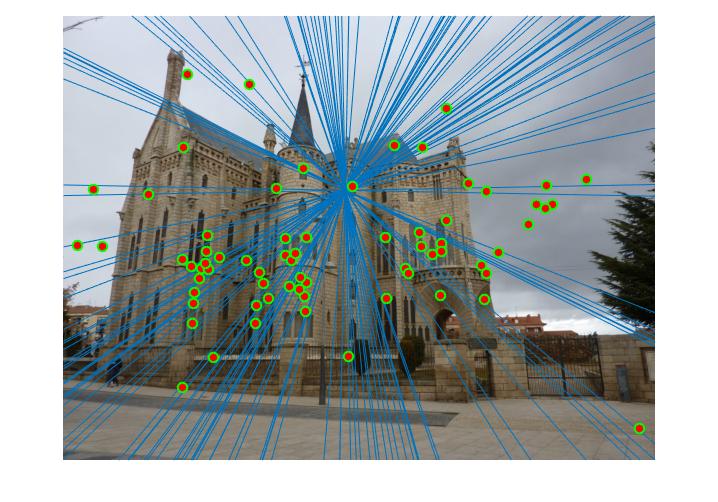
Part III: Fundamental Matrix with RANSAC
|

|
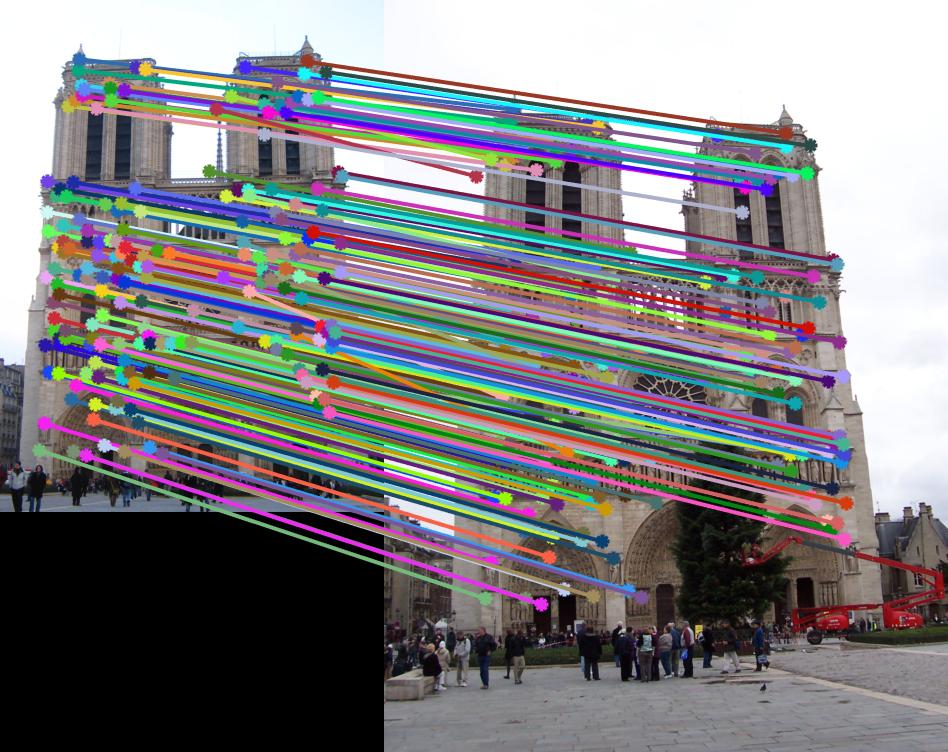
|
Extra Credit: Normalization
| No Normalization | With Normalization |
|
|
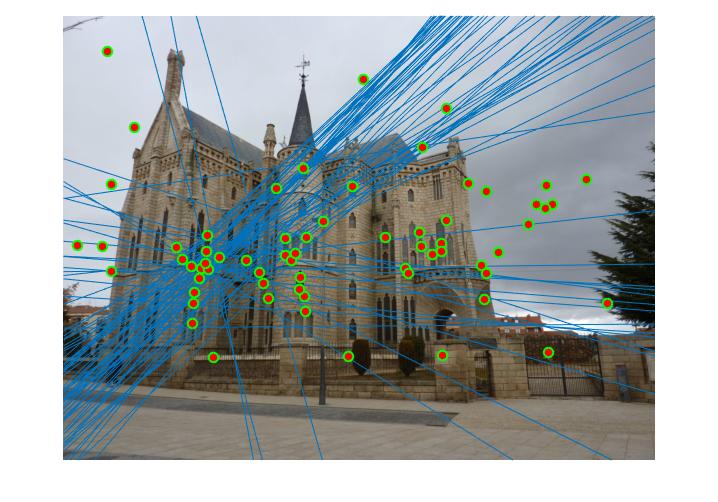
|
|