Project 3: Camera Calibration and Fundamental Matrix Estimation with RANSAC
Part I: Camera Projection Matrix
First, we will find the projection matrix (also called camera matrix). This is a 3x4 matrix which described the mapping of a pinhole camera from 3D points in the world to 2D points in an image. Using this matrix, we can find the position of the camera respective to the world. The following equation described the algebraic approach to finding projection matrix.
In order to solve the equation for the projection matrix, least square regression method was used. Here is the code snippet from calculate_projection_matrix.m file:
n = size(Points_2D, 1);
A = zeros(n * 2, 11);
b = zeros(n * 2, 1);
for i=1:n
A(2 * i - 1, :) = [Points_3D(i, 1), Points_3D(i, 2), Points_3D(i, 3), 1, 0, 0, 0, 0, ...
-Points_2D(i, 1)*Points_3D(i, 1), -Points_2D(i, 1)*Points_3D(i, 2), ...
-Points_2D(i, 1)*Points_3D(i, 3)];
A(2 * i, :) = [0, 0, 0, 0, Points_3D(i, 1), Points_3D(i, 2), Points_3D(i, 3), 1, ...
-Points_2D(i, 2)*Points_3D(i, 1), -Points_2D(i, 2)*Points_3D(i, 2), ...
-Points_2D(i, 2)*Points_3D(i, 3)];
b(2 * i - 1, :) = Points_2D(i, 1);
b(2 * i, :) = Points_2D(i, 2);
end;
X = transpose([A\b;1]);
M = [X(1:4); X(5:8); X(9:12)];
M= -M / sqrt(sumsqr(M));
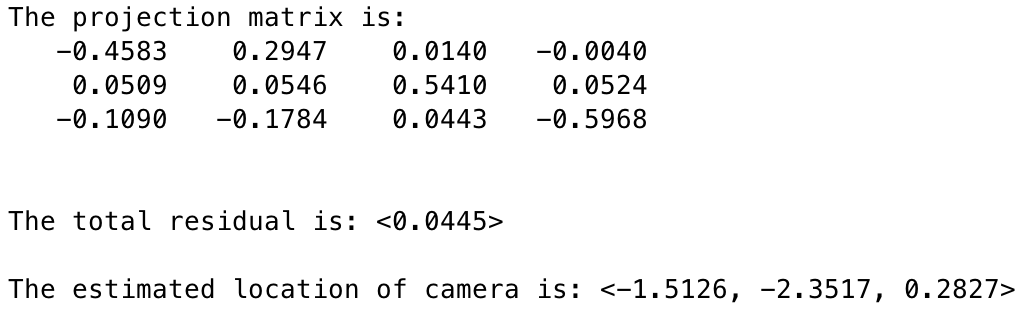
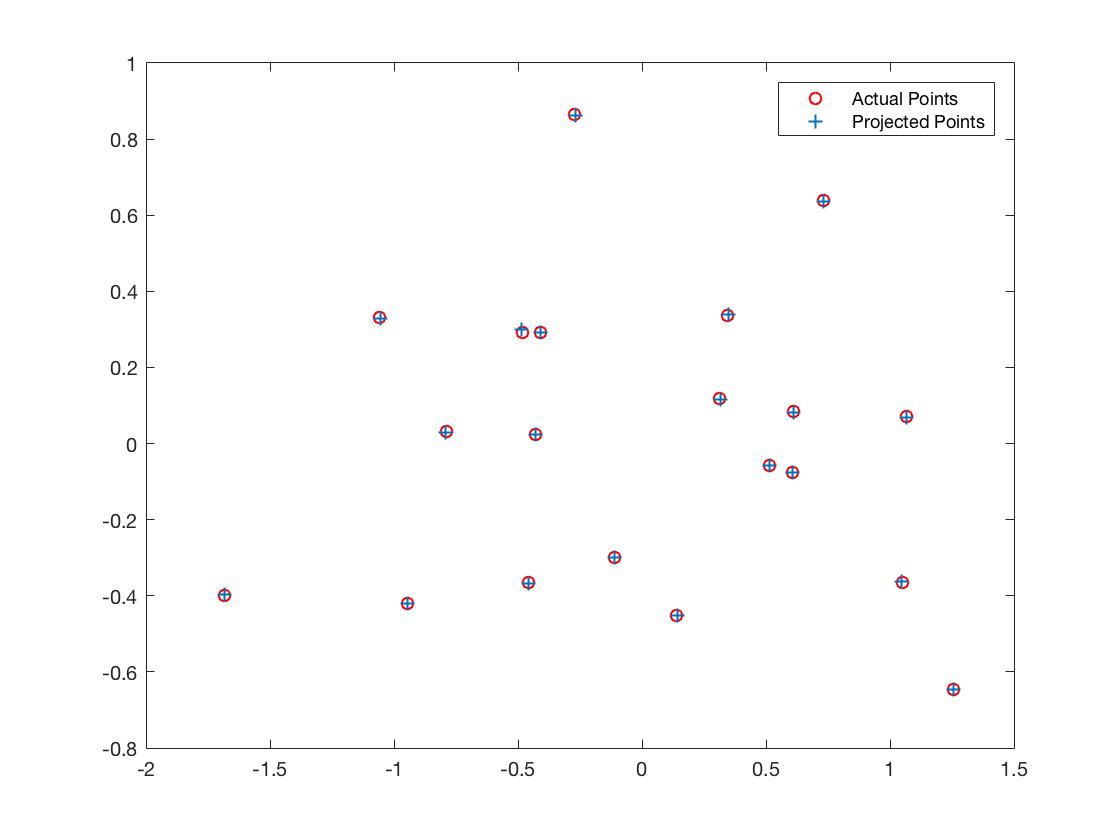
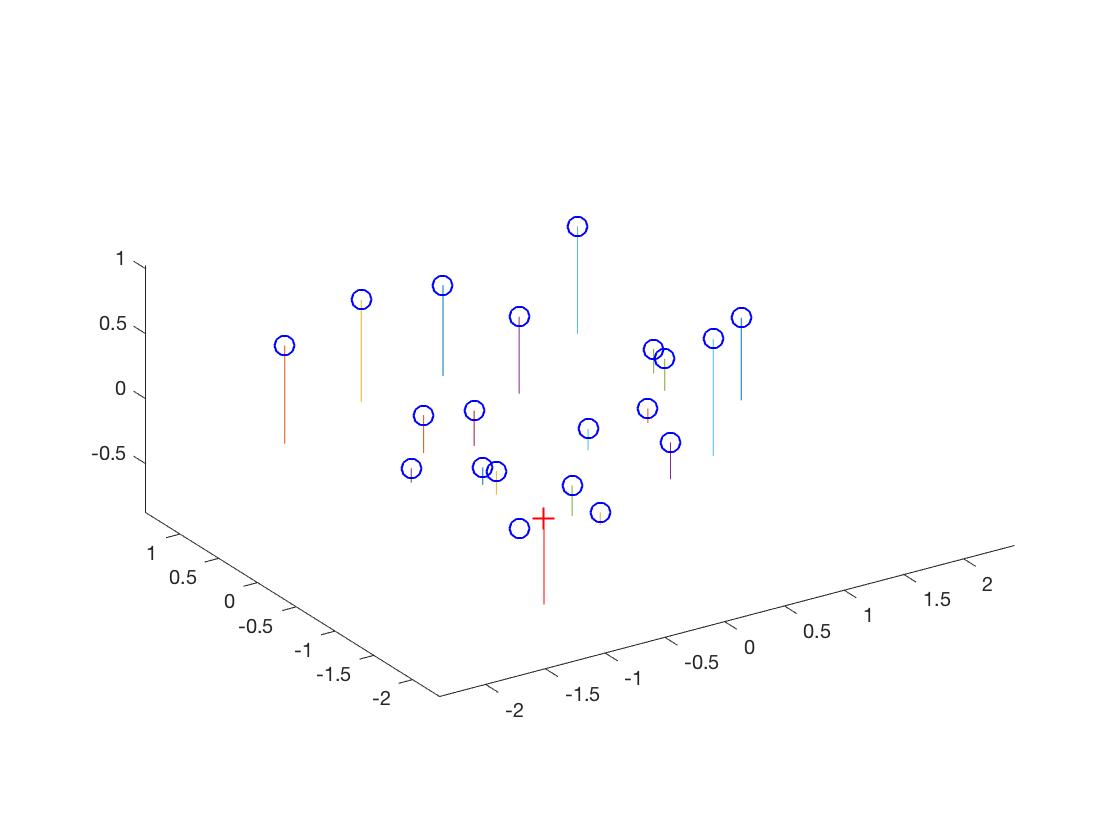
The results I got for the projection matrix were slightly different than the actual expected results. This is because of some floating point rounding done by Matlab when solving the equation. Once I obtained the projection matrix, I calculated the camera center using the projection matrix using the below formula:

Here is the Matlab equivalent of the above equation:
Q = M(:, 1:3);
m4 = M(:, 4);
Center = -inv(Q) * m4;
Because of slight rounding error when calculating the projection matrix, my camera center is also slightly shifted (by very small fraction). This can be described from results below:
Part II: Fundamental Matrix Estimation
The core of this part is to find the fundamental matrix, which is a 3x3 matrix. It will be use to generate epipolar lines which relates corresponding points in stereo images. The mathematical definition of fundamental matrix is as follows:
In order to improve the accuracy of fundamental matrix, I also normalized the coordinate points (part of the extra credit). The code snippet describes my_normalize function used later when estimating fundamental matrix.
c = mean(pts(1:2, :),2);
d = (pts(1:2, :) - repmat(c, [1, size(pts, 2)]));
d = sqrt(2)/mean(sqrt(sum(d.*d, 1)));
M = [d, 0, -d*c(1);
0, d, -d*c(2);
0, 0, 1];
Heres my implementation for estimating fundamental matrix using normalization.
% Converting 2d to 3d
A = [Points_a, ones(length(Points_a), 1)];
B = [Points_b, ones(length(Points_b), 1)];
% Normalizing the points
N1 = my_normalize(A);
N2 = my_normalize(B);
x1 = N1*A';
x2 = N2*B';
% Constructing the M matrix.
M = [];
for i = 1:length(x1)
x = x2 (: , i )* x1 (: , i )';
M(i,:) = x(:)';
end
% SVDing
[~,~,V] = svd(M);
v = V(:,end);
Fn = reshape (v ,[3 3]);
% Enforcing rank 2 contraint
[U,S,V] = svd(Fn);
Fn = U*diag([S(1,1) S(2,2) 0])*(V');
% Denormalizing
F_matrix= N2'*Fn*N1;
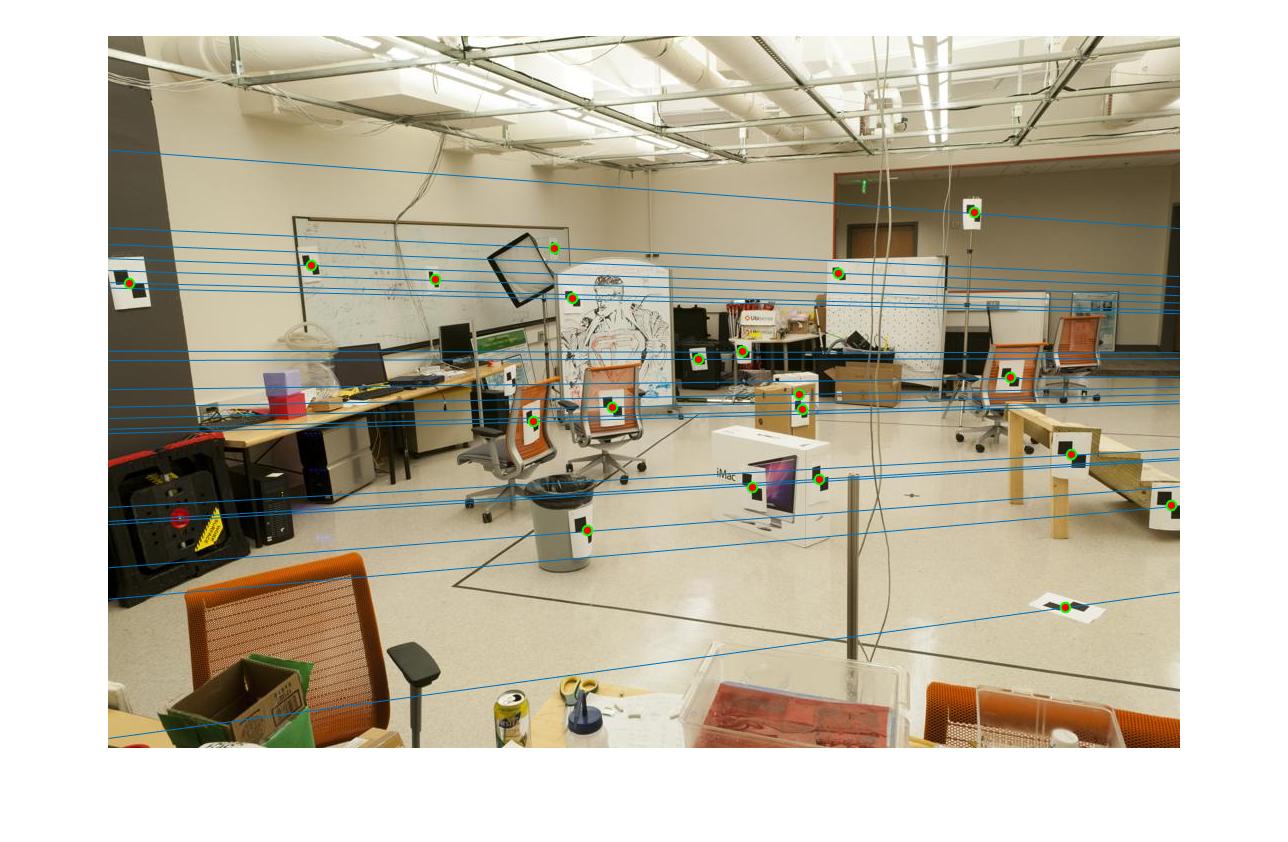
Here are the epipolar lines found using fundamental matrix.

Part III: Fundamental Matrix with RANSAC
Compared to project 2 where we only used our SIFT implementation, I used RANSAC (Random Sample Concensus) along with SIFT to filter some mismatches generated by SIFT. Here is the code snippet for RANSAC
% main loop
for i = 1:iterations
sample = randsample(size(matches_a, 1), 8);
FM = estimate_fundamental_matrix(matches_a(sample, :), matches_a(sample, :));
err = zeros(1, size(A,2));
for row = 1:size(err, 2)
err(row) = B(:, row)'*FM*A(:,row);
end
FM_A = FM*A;
FM_B = FM'*B;
dist = err.^2./(FM_A(1,:).^2 + FM_A(2,:).^2 + FM_B(1,:).^2 + FM_B(2,:).^2);
inliers = find(dist < delta);
if length(inliers) > bestScore
bestScore = length(inliers);
bestModel = inliers;
Best_Fmatrix = FM;
end
end
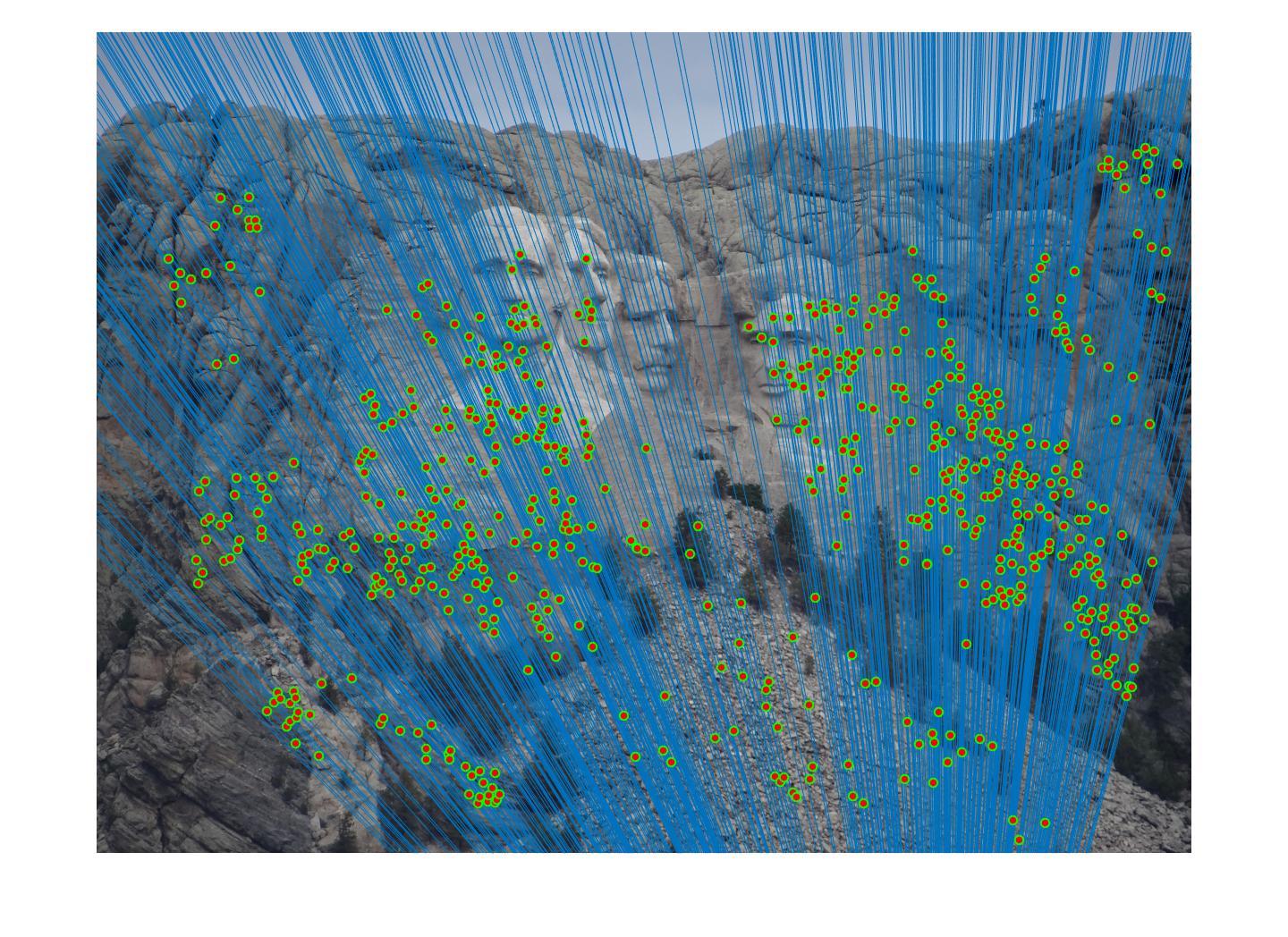
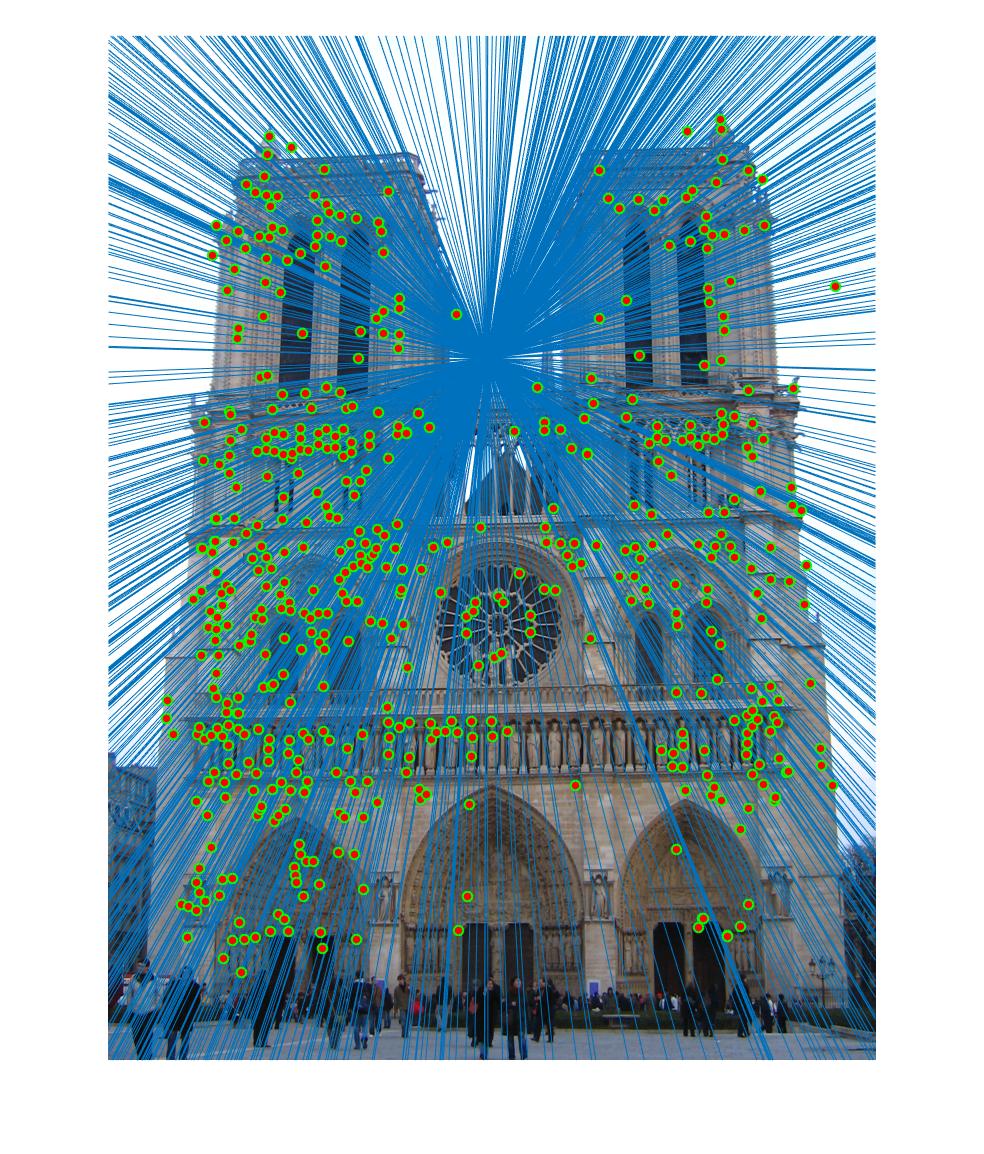
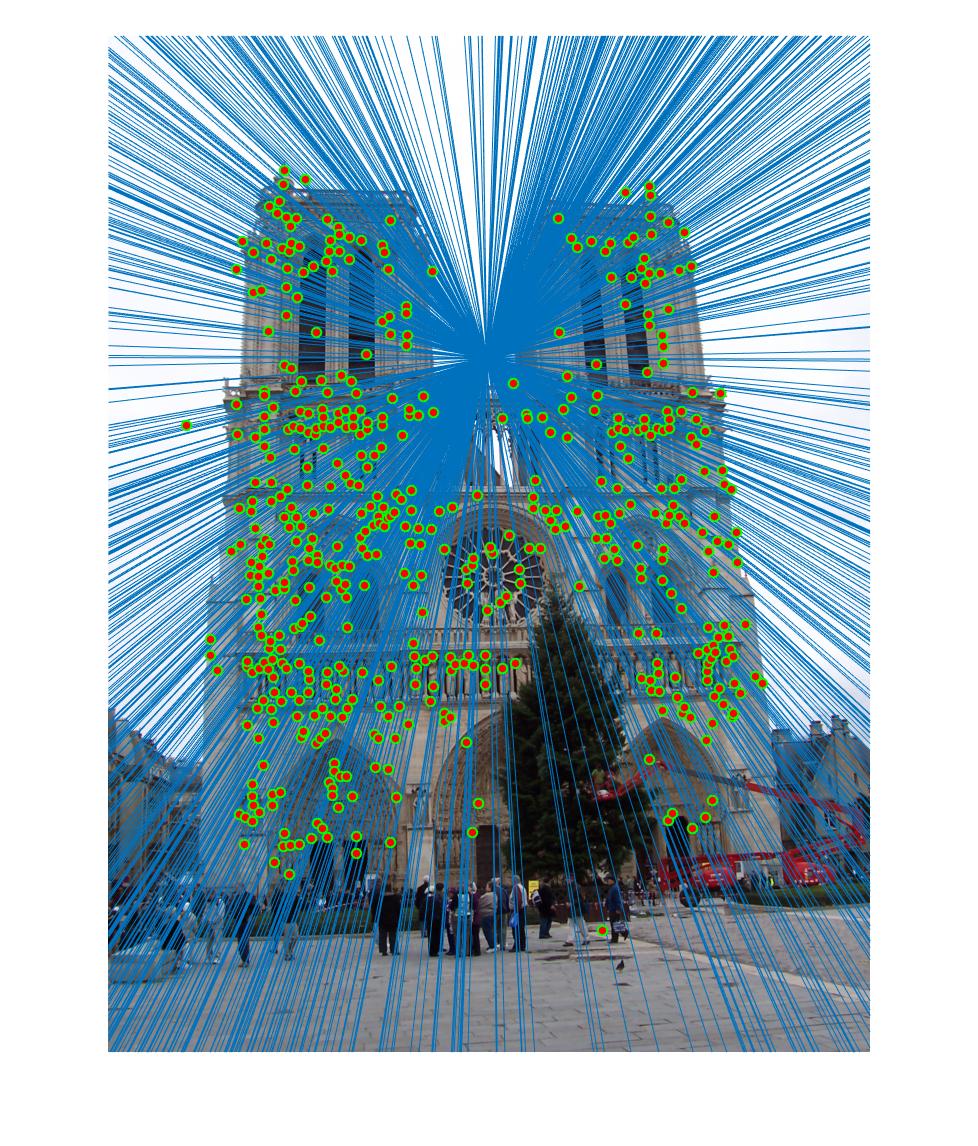
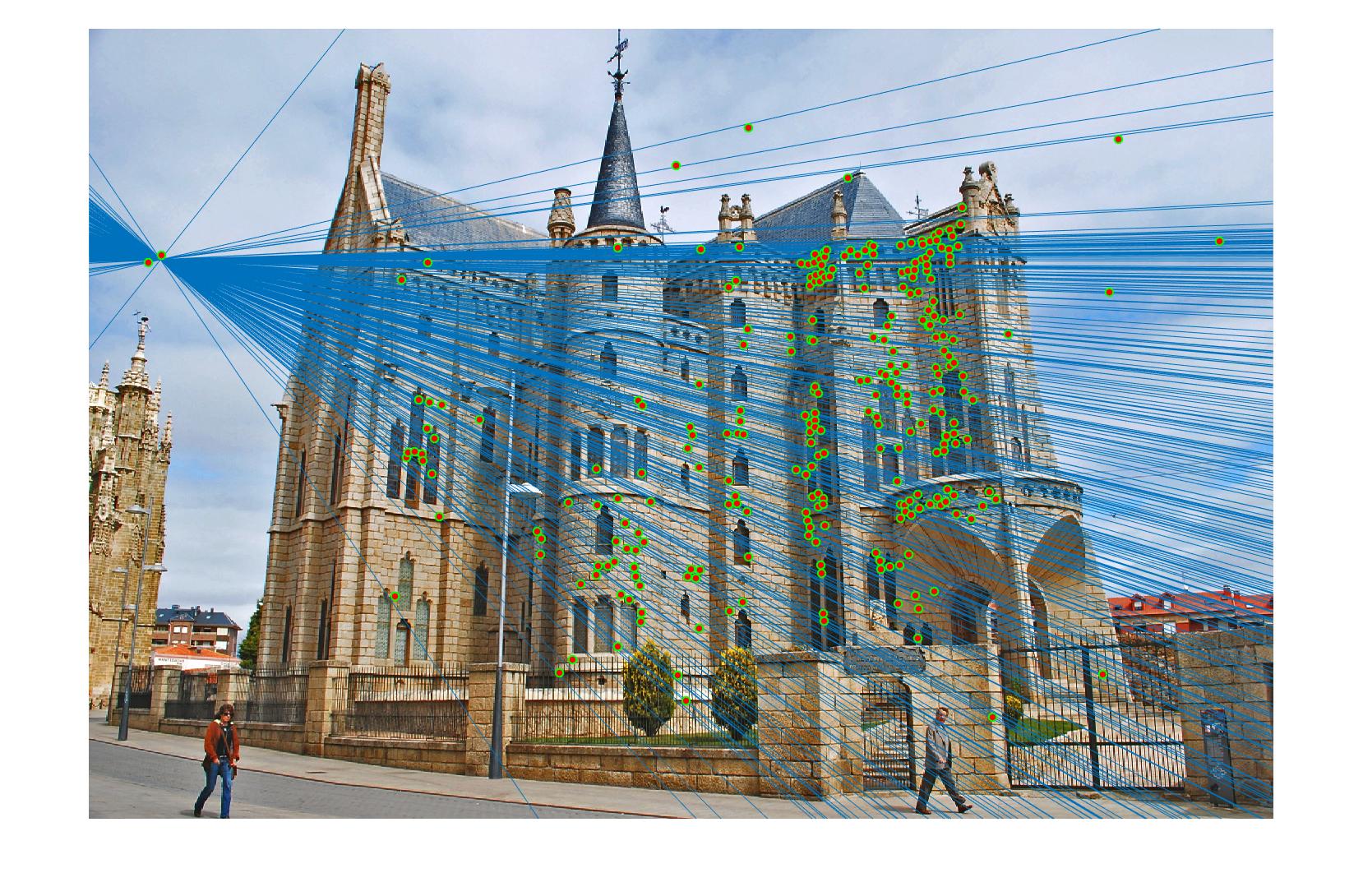
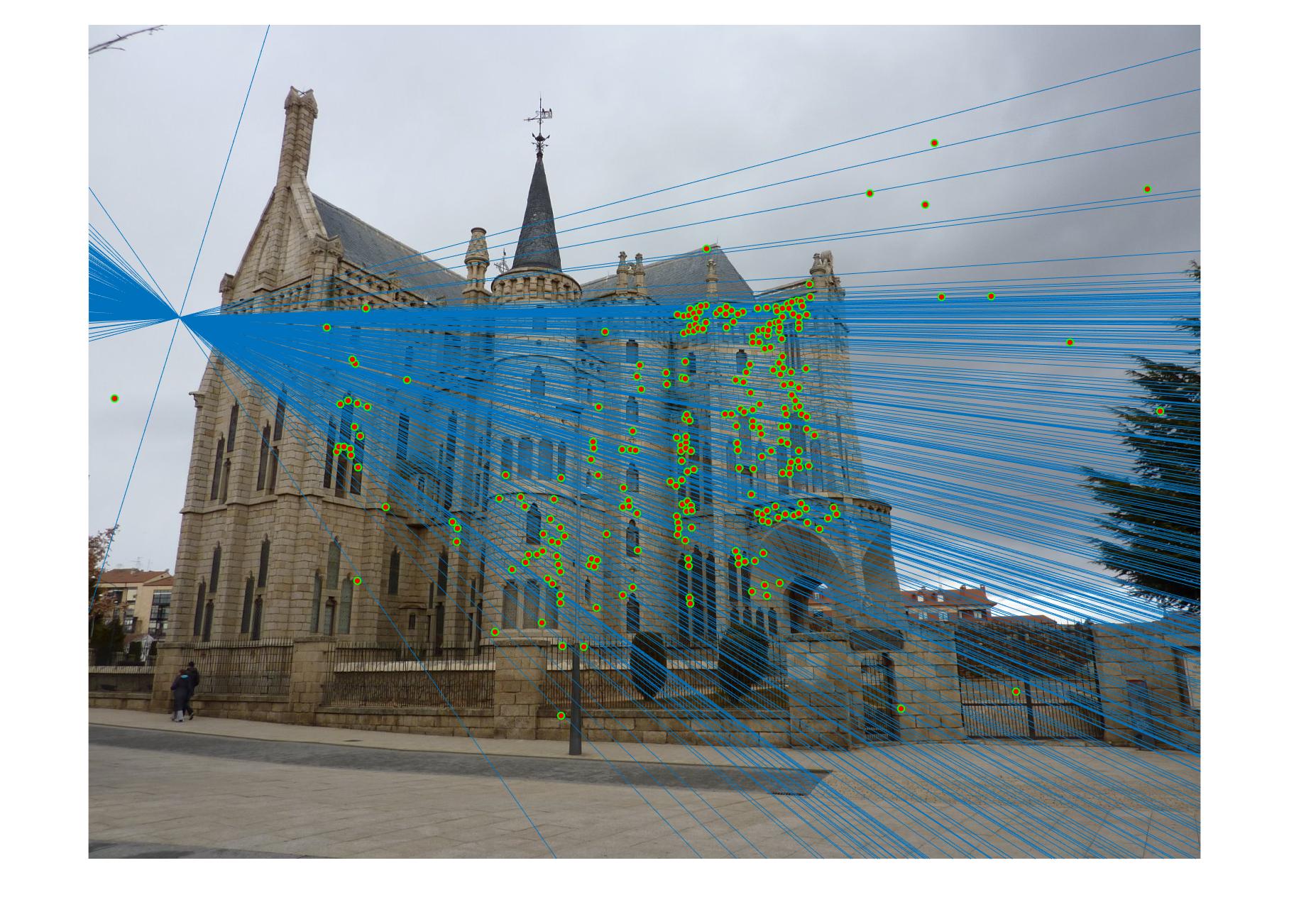
Here are the results using RANSAC fundamental matrix when drawing epipolar lines
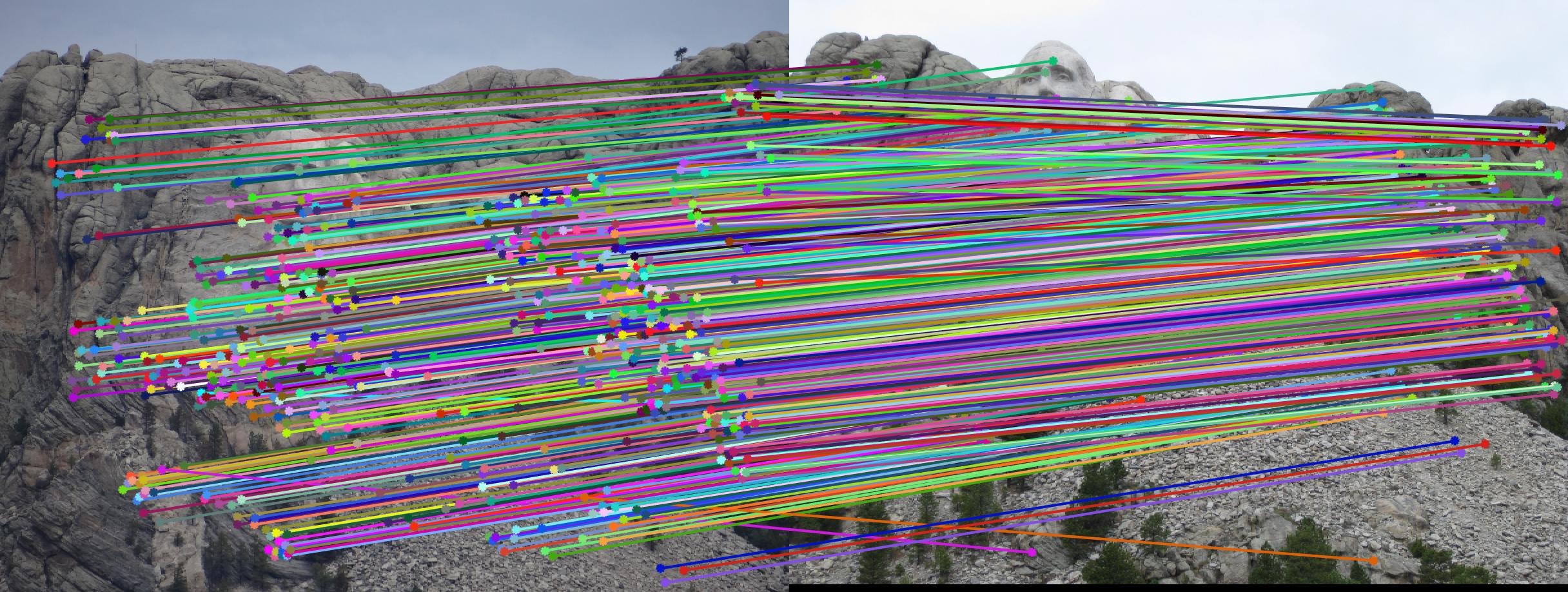
Mount Rushmore
Notre Dame
Episcopal Gaudi
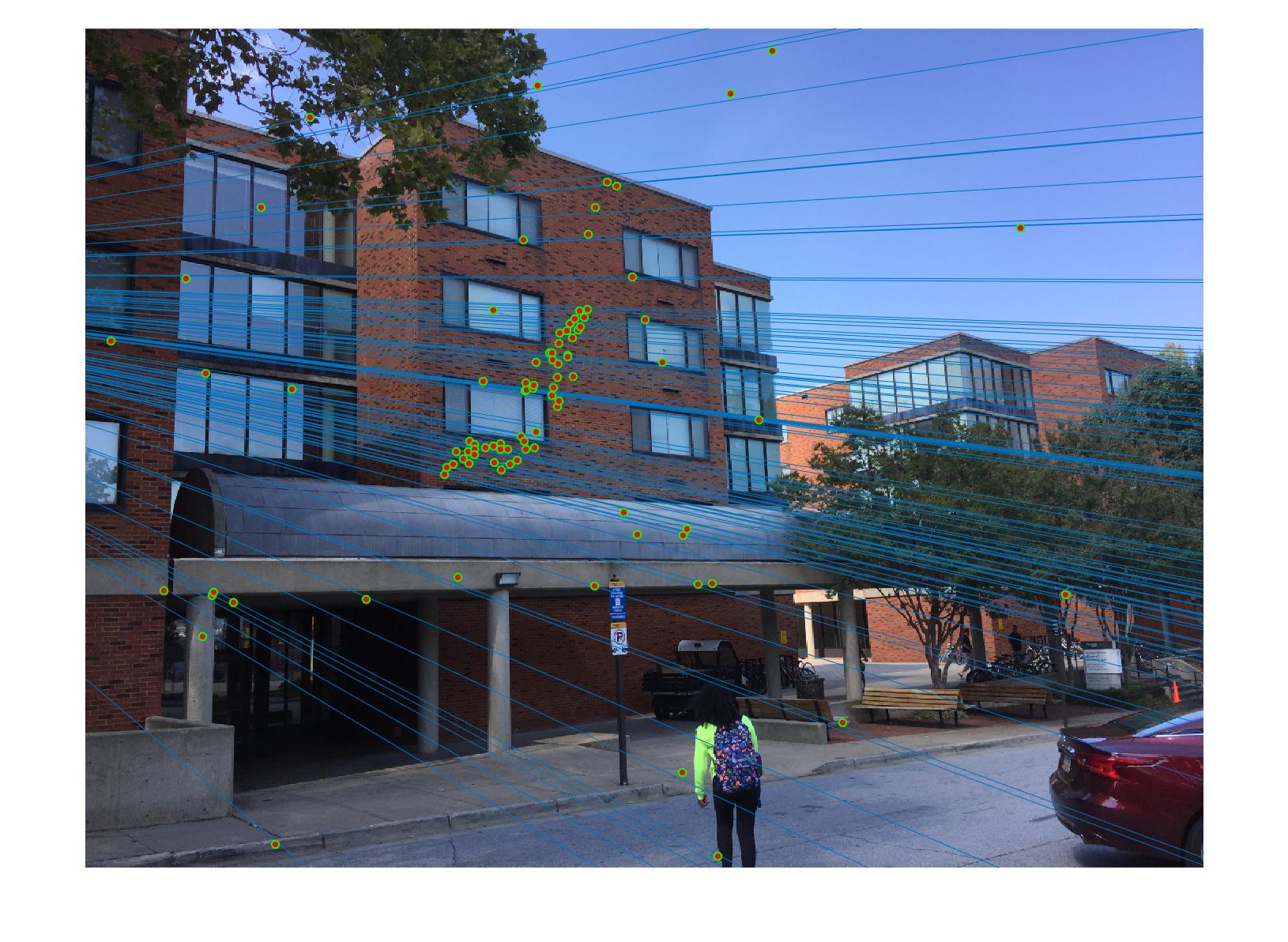
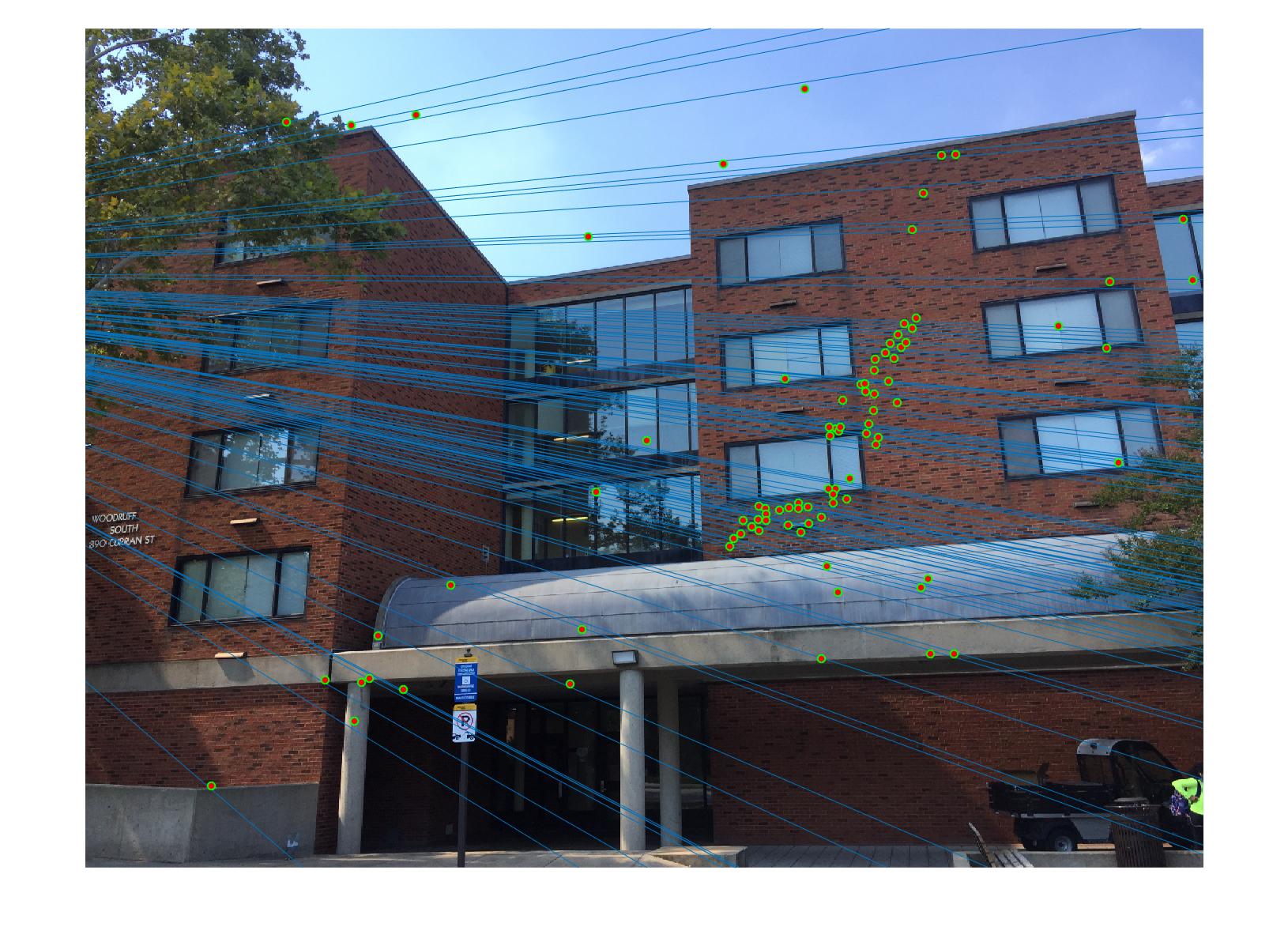
Woodruff Dorm
Final Results
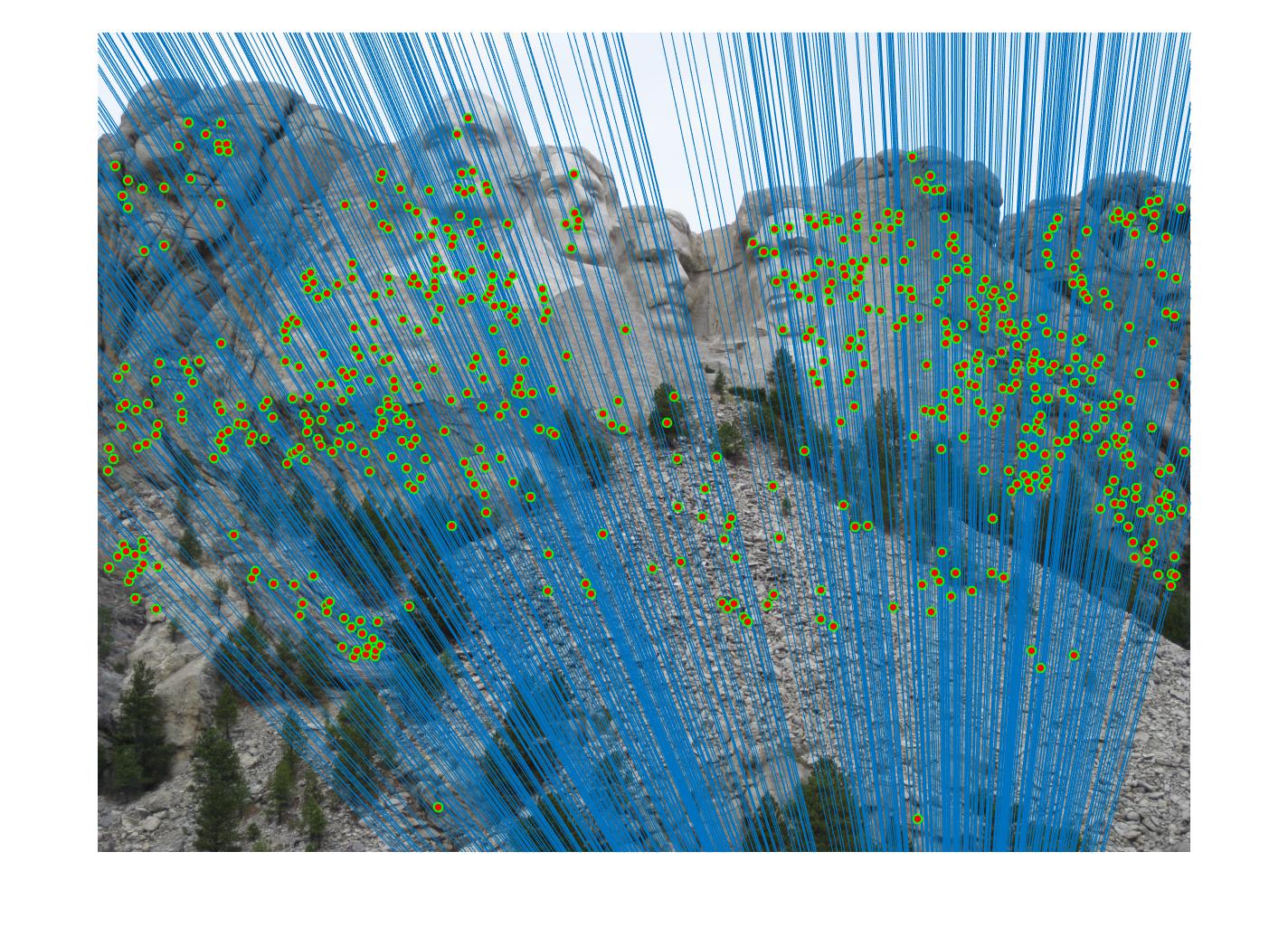
Mount Rushmore
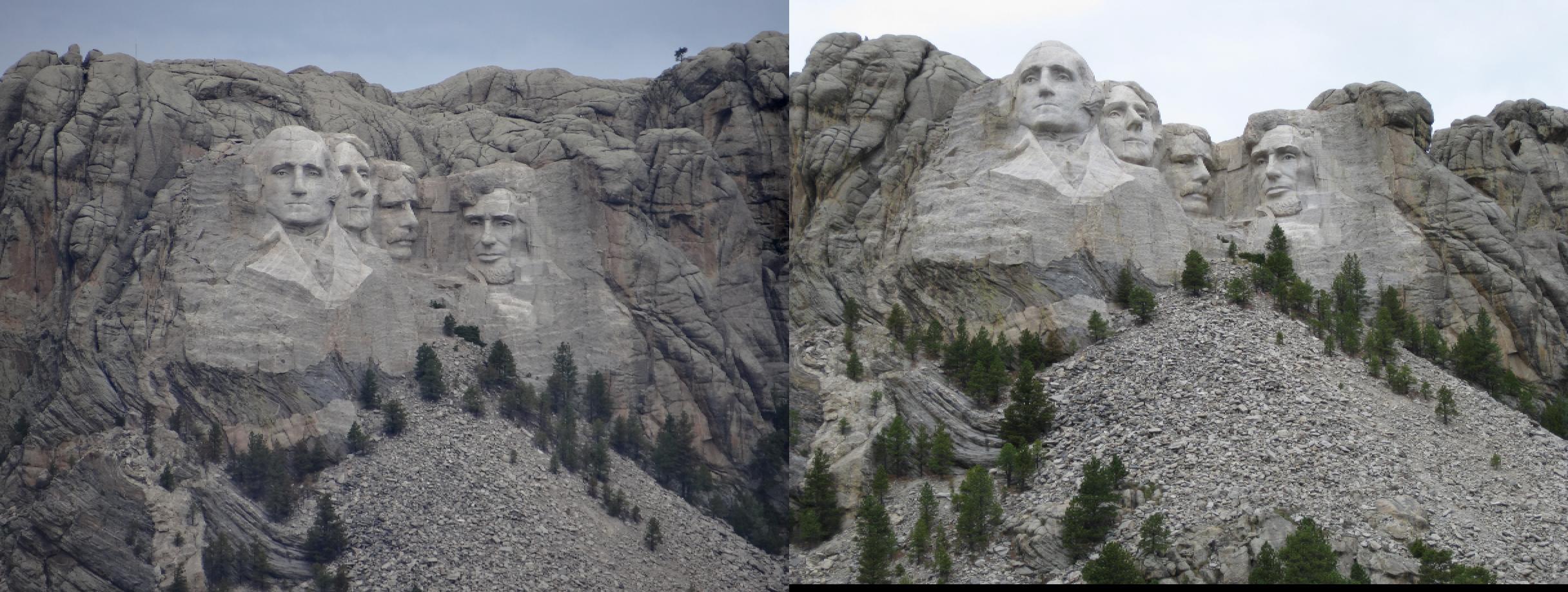
Before RANSAC
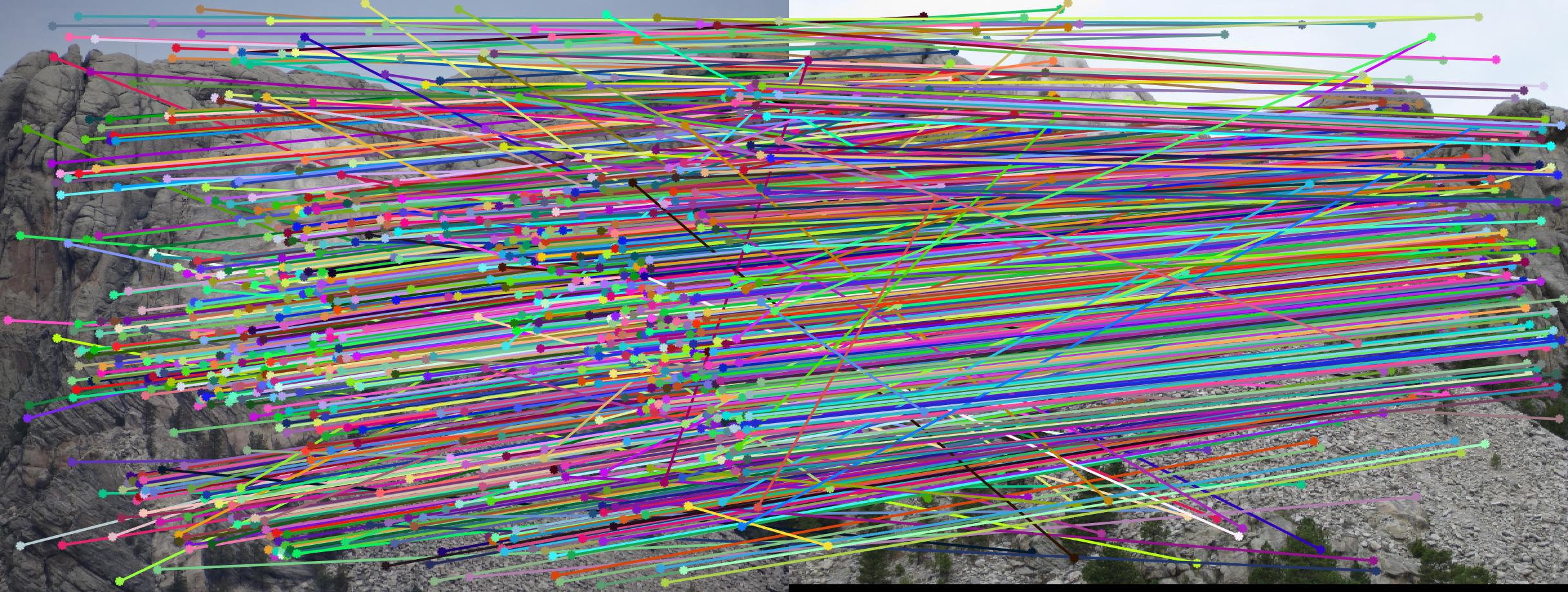
found 5583 SIFT descriptors in pic a found 5249 SIFT descriptors in pic b Found 825 possibly matching features
After RANSAC
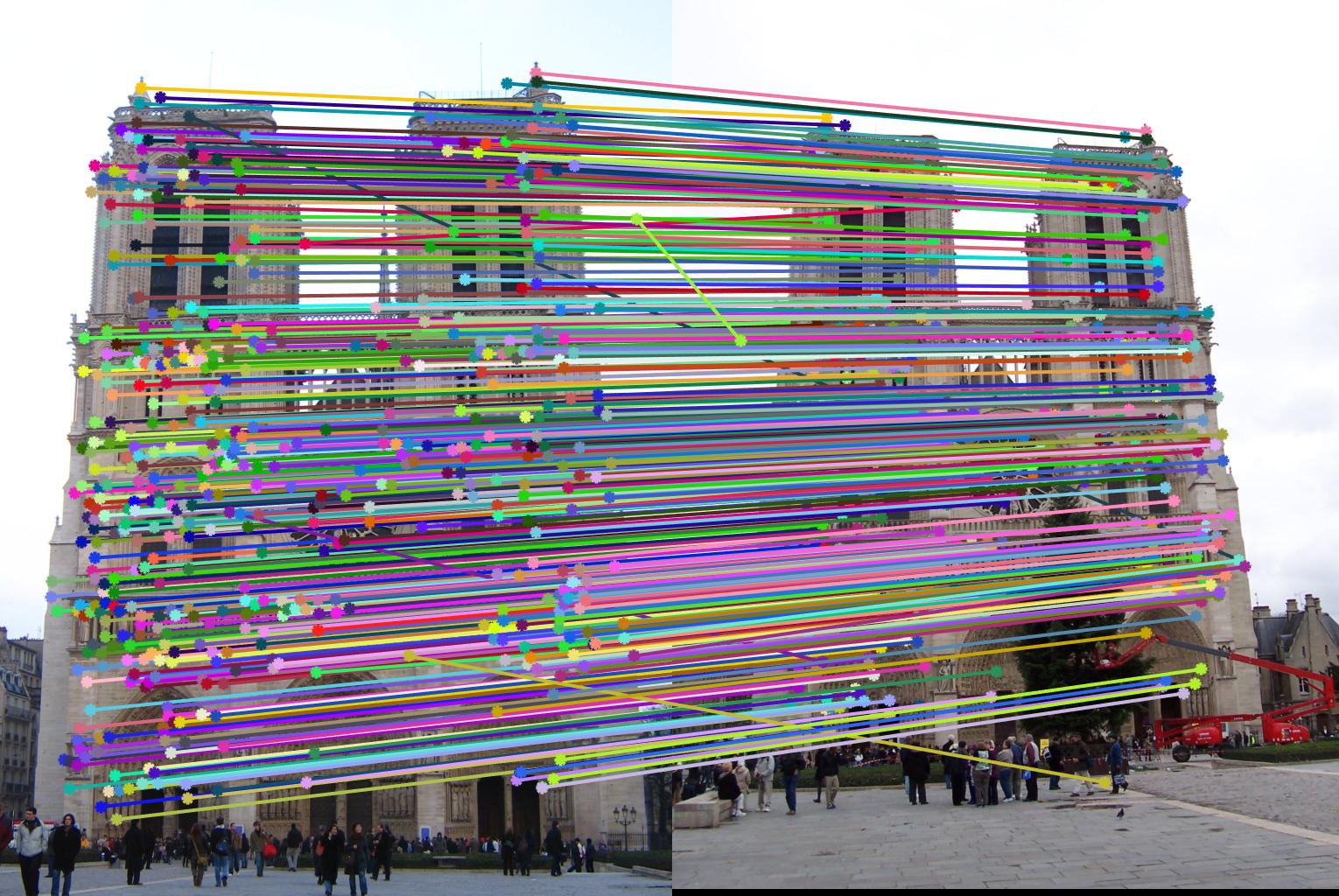
Notre Dame
Before RANSAC
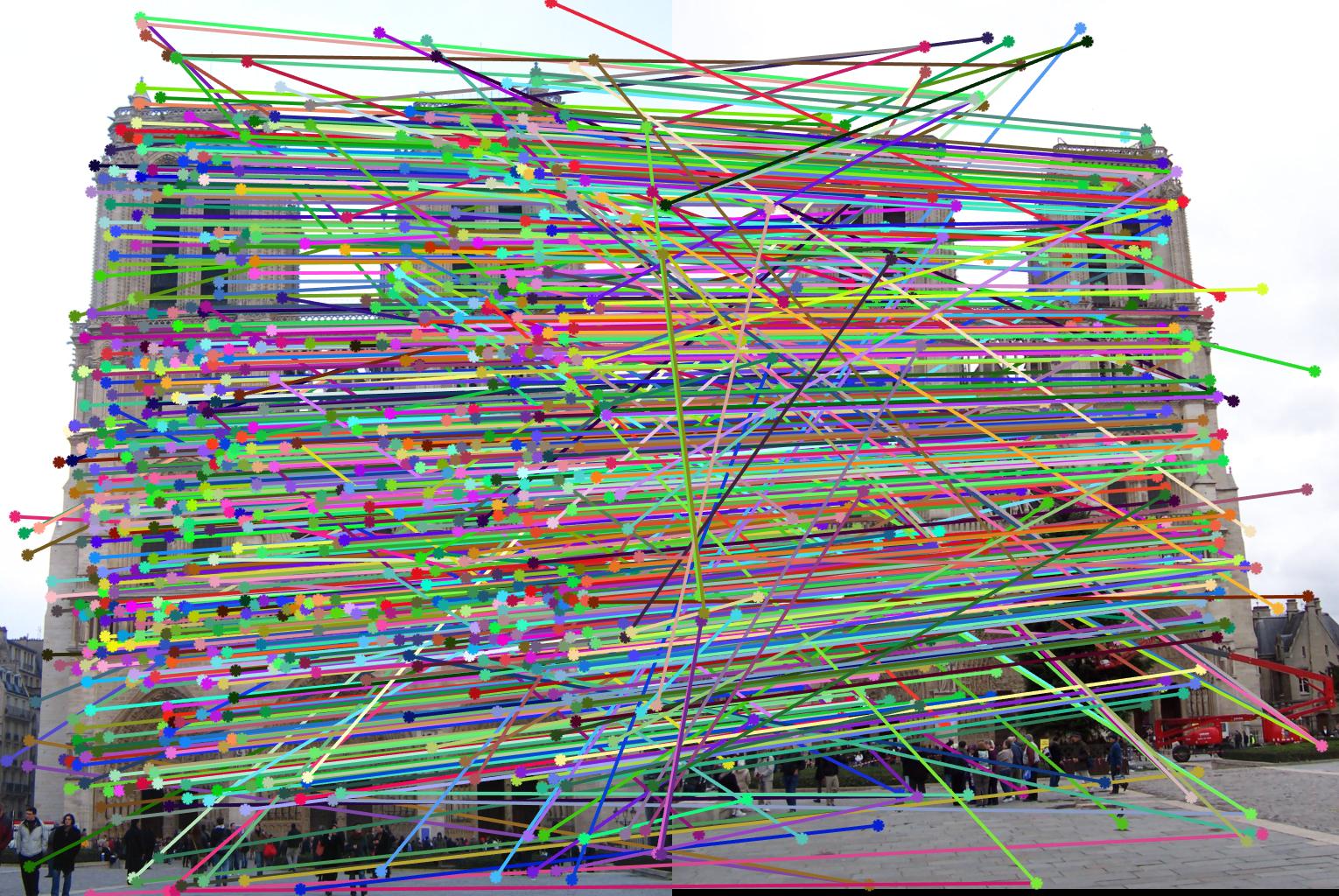
found 3396 SIFT descriptors in pic a found 3025 SIFT descriptors in pic b Found 851 possibly matching features
After RANSAC
Episcopal Gaudi

Before RANSAC
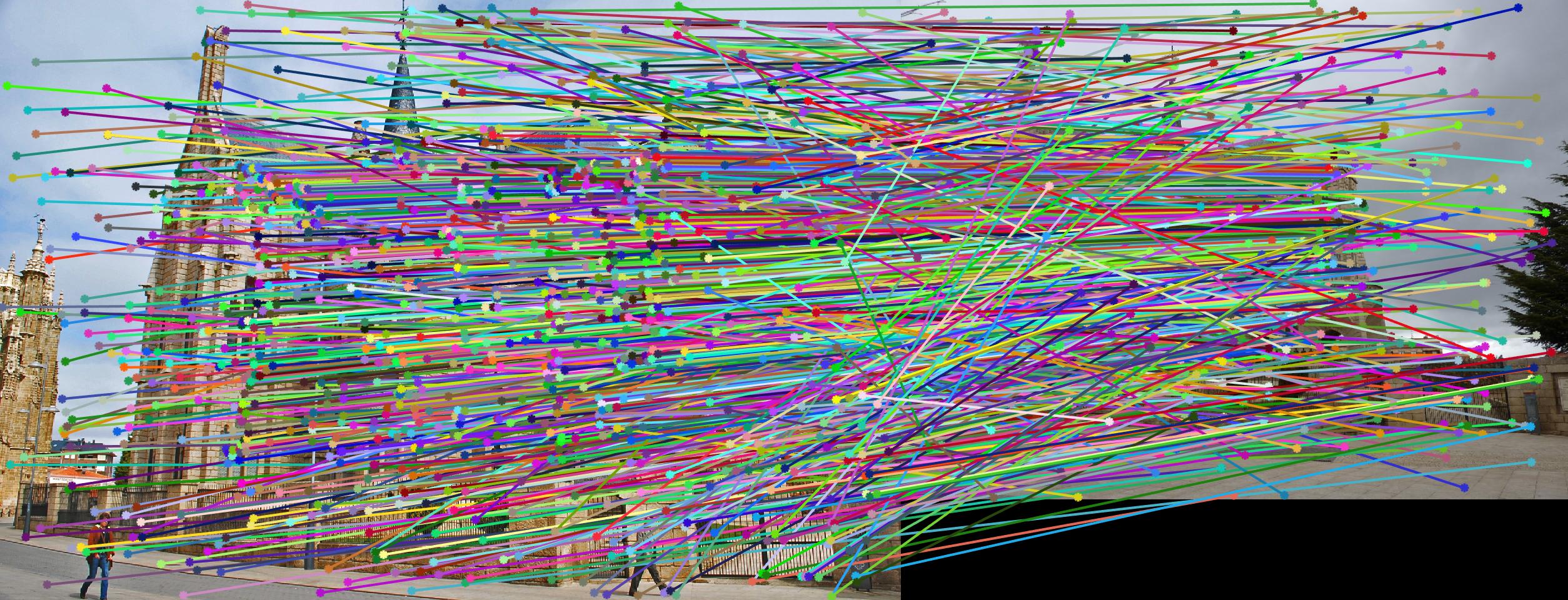
found 12683 SIFT descriptors in pic a found 8766 SIFT descriptors in pic b Found 1062 possibly matching features
After RANSAC

Woodruff Dorm

Before RANSAC

found 10614 SIFT descriptors in pic a found 10109 SIFT descriptors in pic b Found 887 possibly matching features
After RANSAC
