Project 5 / Face Detection with a Sliding Window

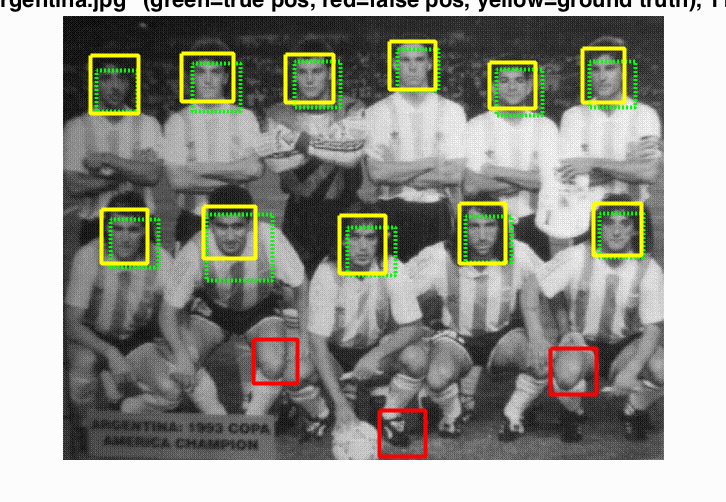
Example result of face detection.
The example on the right shows the result of my face detection on a class picture. The face detection has three major steps.
- Get HOG features from positive training image crops and random negtives samples.
- Train a classifier on the HOG features.
- Run the classifier on test images in multiple scale and sliding windows and detect faces.
Get HOG features
For the 36 x 36 image crops with positive features, I simply use the vl_hog function to get the HOG features for each image crop. For the random negative image samples, I randomize three parameters: the image id, the downsampling scale and the position of the 36 x 36 patch. The scale ranges from feature_params.template_size / min(size(image)) to 1 in that the downsampled image has to be at least 36 x 36.
Train a classifier
I use the vl_svmtrain function to train an SVM that classifies if an image patch represents a face. The SVM is trained with the HOG features obtained in the previous step. An important parameter here is the lambda, which controls the amount of bias. I test different lambda with the same training data and all other parameters fixed.
| Lambda | Average Precision | False Positive |
| 0.01 | 0.813 | 150 |
| 0.001 | 0.827 | 160 |
| 0.0001 | 0.843 | more than 300 |
| 0.00001 | 0.857 | more than 300 |
From the table above, we can see that 0.001 has a decent average precision and a reasonable amount of false positive.
Face detection
For each test image, I run the detector on different downsampling scales and use max suppression to remove the duplicate detections of different scales.
The scale step is an important parameter. I downsample the image by a scale of 0.95 in every loop recursively. For example, the size of the downsampled image is 0.95 * original size in loop 2 and 0.95 ^ 2 * original size in loop 3. A smaller scale reduces the amount of computation whereas a large scale finds more faces and also increases the false positive rate. From my experiment, 0.95 is the best number for this parameter. A scale larger than 0.95 increases the computation time and does not increase the average precision much.
For each downsampled image, I run vl_hog on the whole image and get an array of HOG cells. Then I use a sliding window of 6 x 6 HOG cells and step the sliding window by 1 HOG cell. I run the SVM classifier on the sliding window and register the window as face if the classifier output is larger than a threshold.
The threshold is the most interesting parameter to play with. It controls how strict the detector filters out non-face detections. It is a tradeoff between recall rate and false positive rate. A higher threshold passes less detections and thus produces less true positive and false positive. A lower threshold does the opposite. The goal is to find more true positive and less false positive. From experiment, I find 1.75 is the best threshold, which gives around 0.83 average precision and 150 false positive. I can always get better average precision if I use a lower threshold such as 1 but the false positive rate will be too high. If I use 2.25 as the threshold, I can get 75 false positive but I can only get around 0.79 average precision.
Code that runs the classifier on different sliding windows and different downsampling scale
while min(size(image)) >= feature_params.template_size
HOG = vl_hog(single(image), feature_params.hog_cell_size);
for row = 1 : size(HOG, 1) - feature_params.template_size / feature_params.hog_cell_size + 1
for col = 1 : size(HOG, 2) - feature_params.template_size / feature_params.hog_cell_size + 1
HOG_win = HOG(row : row + feature_params.template_size / feature_params.hog_cell_size - 1, col : col + feature_params.template_size / feature_params.hog_cell_size - 1, :);
HOG_win = reshape(HOG_win, 1, D);
confidence = HOG_win * w + b;
if confidence > 1.75
cur_x_min = floor(col * feature_params.hog_cell_size / scale);
cur_y_min = floor(row * feature_params.hog_cell_size / scale);
cur_bboxes = [cur_bboxes; cur_x_min, cur_y_min, cur_x_min + floor(feature_params.template_size / scale), cur_y_min + floor(feature_params.template_size / scale)];
cur_confidences = [cur_confidences; confidence];
cur_image_ids = [cur_image_ids; test_scenes(i).name];
end
end
end
image = imresize(image, 0.95);
scale = scale * 0.95;
end
Results in a table


|
|


|


|

|
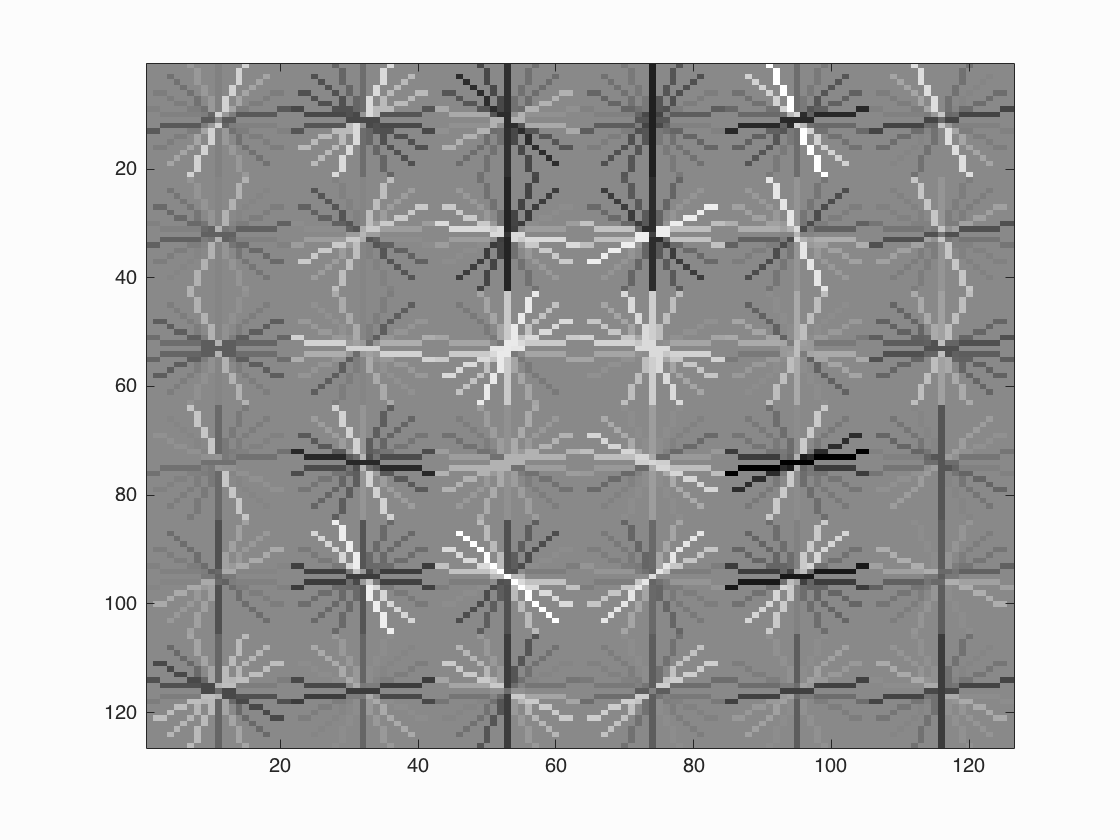
Face template HoG visualization.
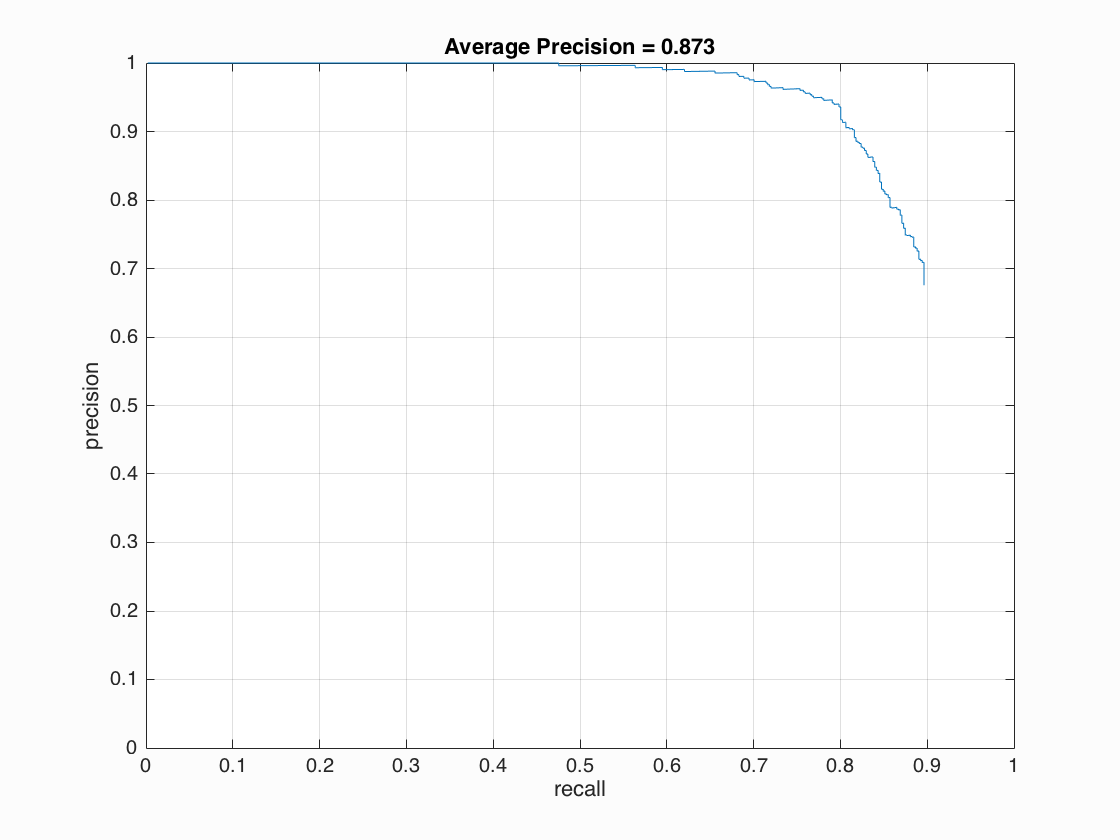
Precision Recall curve.
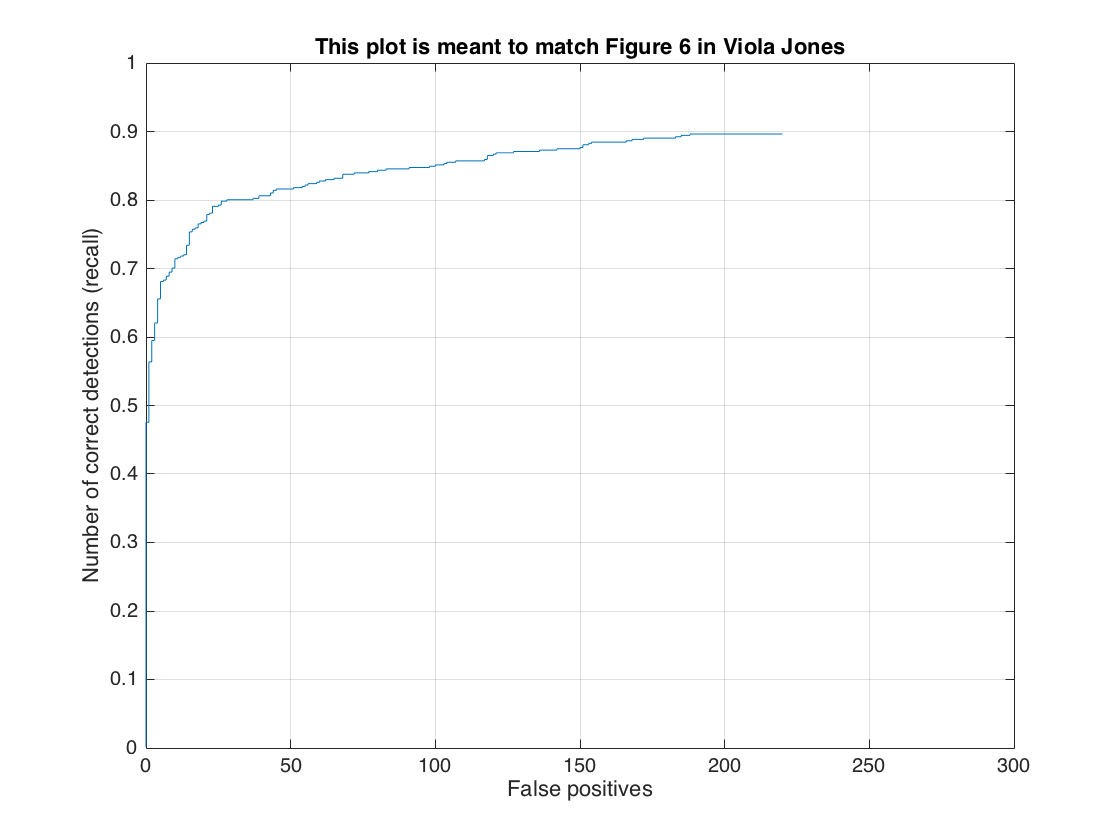
False Positive curve.
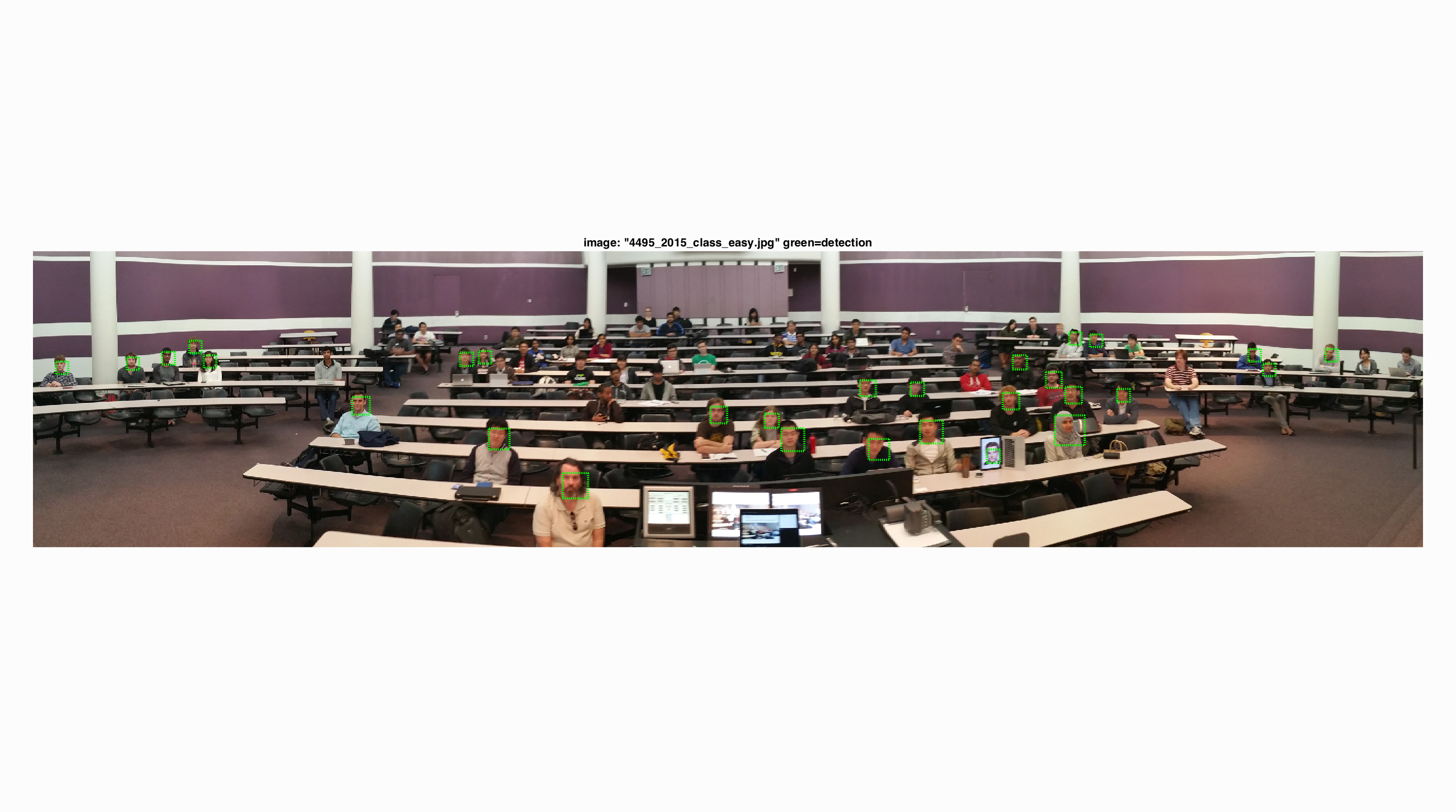
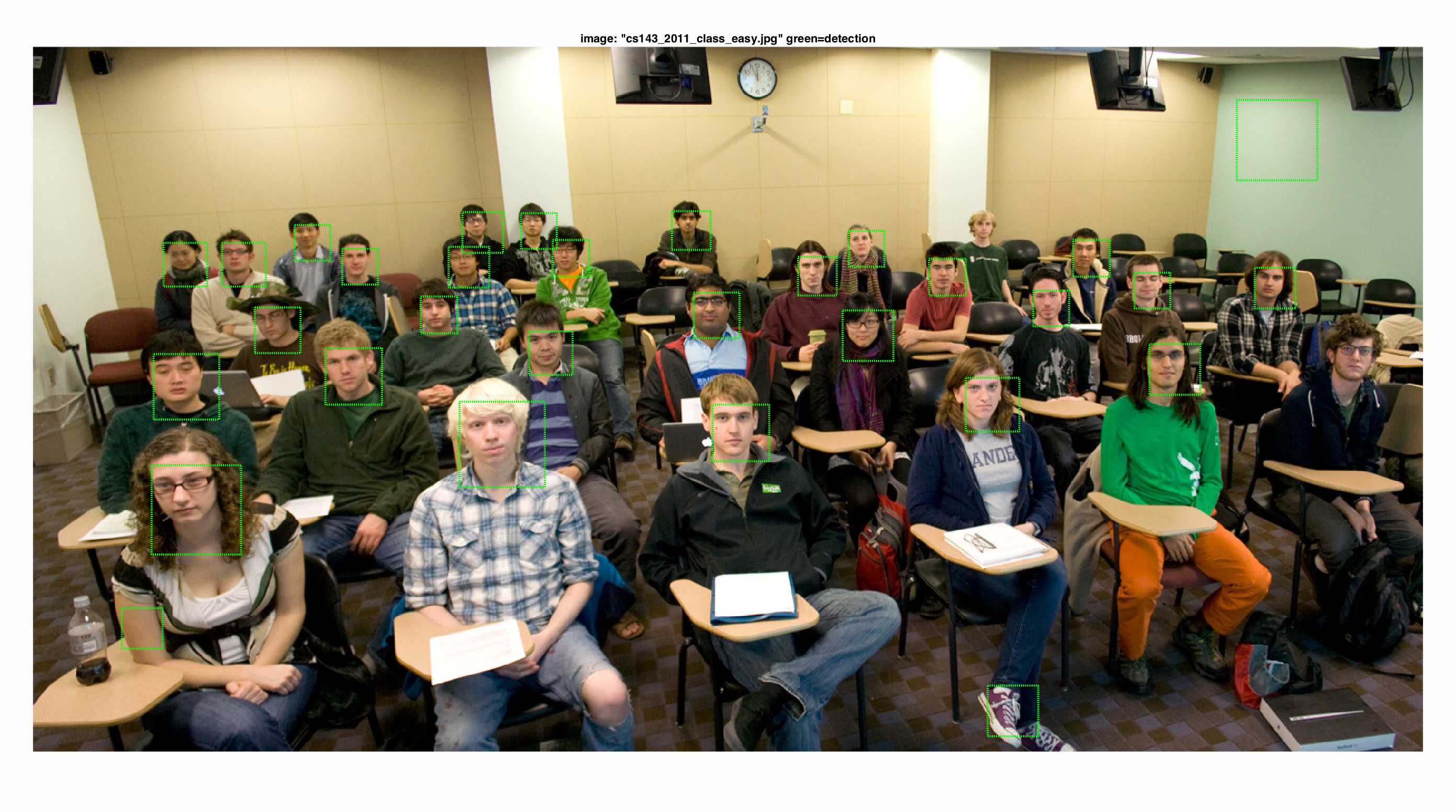
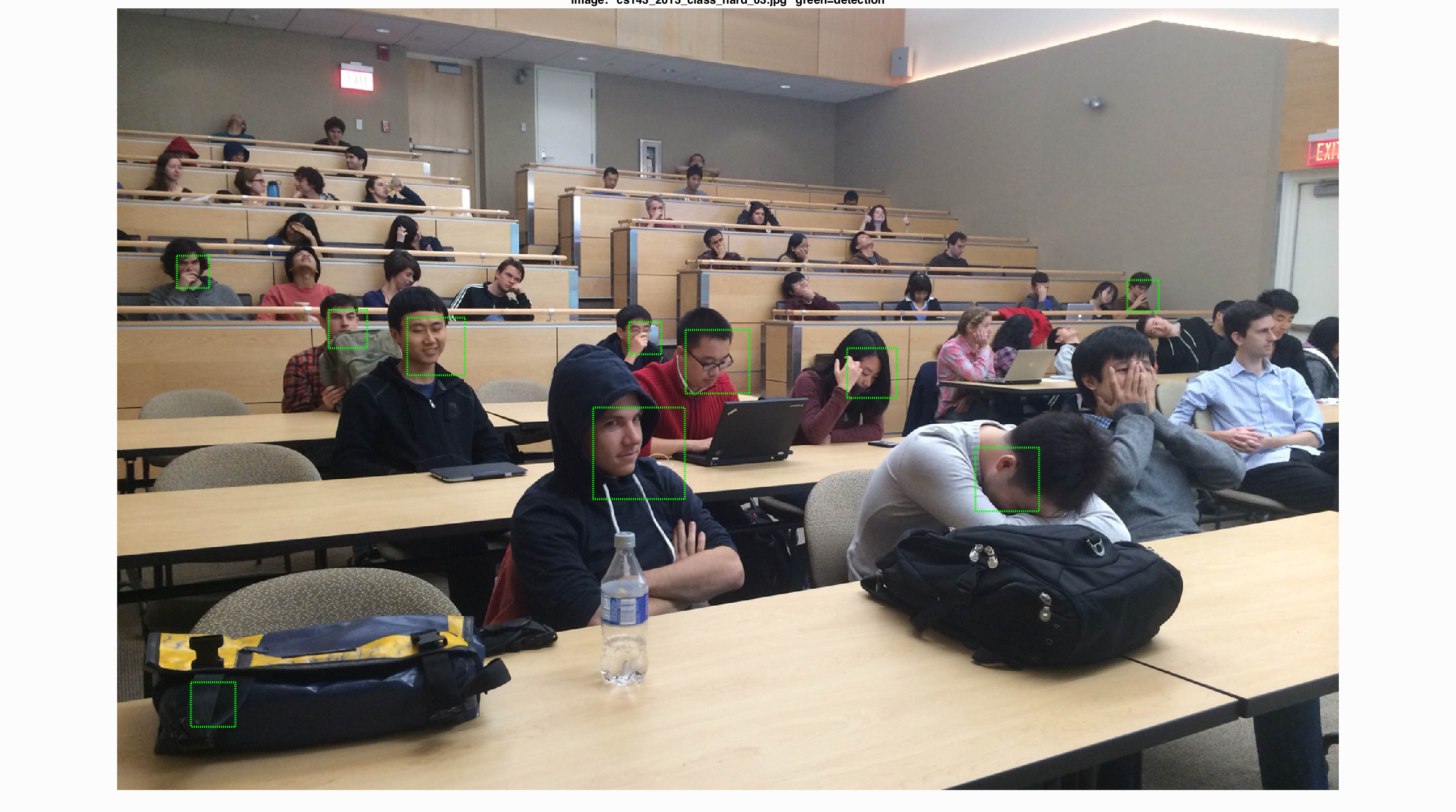
Examples of detection on the test set.