Contact: Gabriel J. Brostow, http://www.cc.gatech.edu/~brostow
Abstract
Volumetric structures are frequently used as shape descriptors for 3D data. The capture of such data is being facilitated by developments
in multi-view video and range scanning, extending to subjects that are alive and moving. In this paper, we examine vision-based modeling
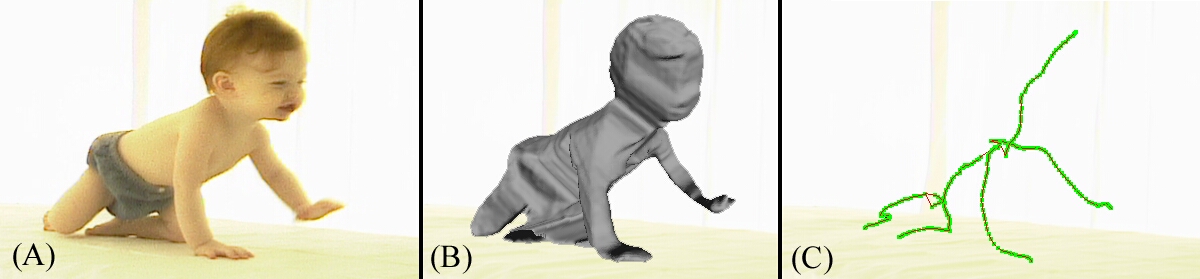
and the related representation of moving articulated creatures using spines. We define a spine as a branching axial structure representing
the shape and topology of a 3D object’s limbs, and capturing the limbs’correspondence and motion over time.
Our spine concept builds on skeletal representations often used to describe the internal structure of an articulated object and the significant
protrusions. The algorithms for determining both 2D and 3D skeletons generally use an objective function tuned to balance stability against
the responsiveness to detail. Our representation of a spine provides for enhancements over a 3D skeleton, afforded by temporal robustness
and correspondence. We also introduce a probabilistic framework that is needed to compute the spine from a sequence of surface data.
We present a practical implementation that approximates the spine’s joint probability function to reconstruct spines for synthetic and real
subjects that move.
Texts
Gabriel J. Brostow, Irfan Essa, Drew Steedly, and Vivek Kwatra
"Novel Skeletal Representation For Articulated Creatures"
ECCV, May 2004, Vol III: 66-78.
Official version © Springer-Verlag
ECCV 2004.pdf (5Mb) BibTex
Gabriel J. Brostow
"Novel Skeletal Representation For Articulated Creatures"
Ph.D. Thesis, Georgia Institute of Technology, 2004.
Visuals
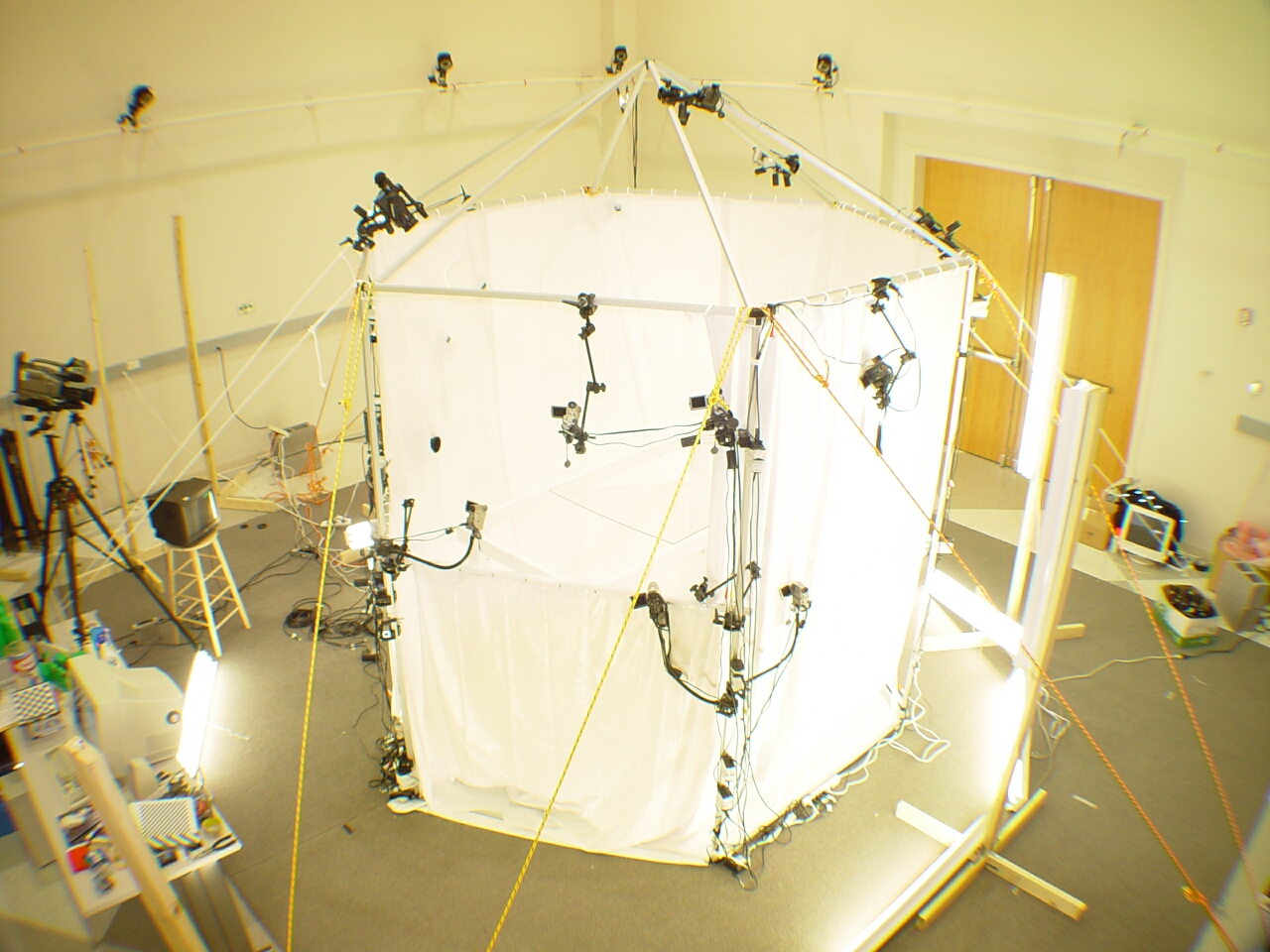
Picture of data-catpure stage (800Kb)
New Subjects
(these datasets are not yet processed)



{kind=link}