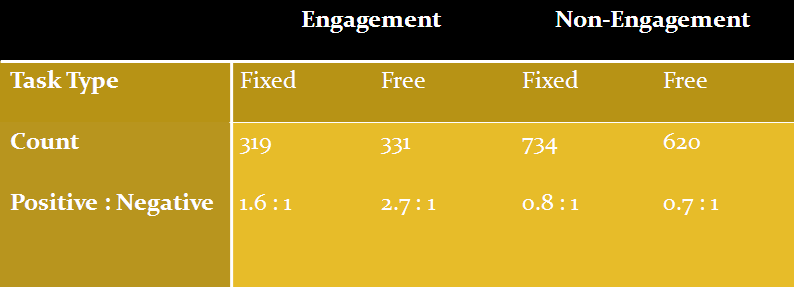
This table shows the numerical results we parsed from looking at the touch sensor logs generated by the Geo. The count is of the total number of reward signals and punishment signals given (the number of times each sensor was touched); positive:negative is the ratio of positive reward signals to negative reward signals given. From the results, we can draw several conclusions. First, non-engagement Geo produced approximately twice as many touches as engagement Geo. This result surprised us, as we thought people would interact with engagement Geo more. However, it turns out that the additional touches for the non-engagement Geo were due to the lack of feedback responses from the Geo. This silence on the part of the Geo caused people to not understand whether their reward and punishment signals were being received, which in turn led to overcompensation. We also observed that some people treated engagement Geo with some degree of “fear” – as if the autonomous behavior was coming from a living entity, and as such were reluctant to touch it extensively and unnecessarily. People in this category typically became more willing to touch the Geo overtime, as they “warmed” to it. The second observation that we can draw from the experiment is that the ratio of positive to negative rewards depend significantly on engagement. With engagement mechanisms turned on, people gave a lot more positive rewards (relative to negative rewards) than when engagement mechanisms were turned off. We believe that this is because people viewed engagement Geo as a more social, “lifelike” entity, and as such did not want to “hurt” it by giving too many negative rewards. A third and final observation is that with the engagement Geo, the ratio of positive to negative rewards appear to skew towards the positive overtime, which is reflected in the higher ratio (2.7:1 vs 1.6:1 positive:negative ratio) in the freeform dance task, which always comes after the fixed dance task. Meanwhile, with non-engagement Geo, the ratio of positive to negative rewards did not show any real difference between the hokey-pokey “fixed” dance teaching task and the freeform dance teaching task. This could be because people were “warming” up to engagement Geo overtime and began developing some sort of “social connection” with it.