Affordance Learning

What we mean by affordances within the context of this study is what can or cannot be done with an object, i.e. the effect obtained upon the execution of an action towards an object.
What we mean by affordance learning is learning to predict effect that an action will create in a certain context.
There are controversial views on what was originally meant by J.J. Gibson and E.J. Gibson, with “affordance” and “learning of an affordance”, however this type of framework has been referred to as learning affordances in several previous work in robotics. Our framework mostly resembles Montesano et al.’s work on learning object affordances, where affordances are relations between actions, objects and effects.
Read more on affordance learning with robots from the ScienceDaily article:
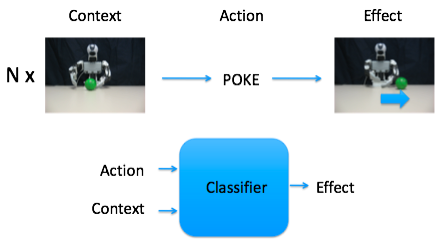
Action: Grasp, poke
Context: Neck and body position, object size, color, eccentricity, orientation
Effect: Change in object position, size, eccentricity, orientation, motor load on the arms and the maximum flow angle (which direction is most of most of things flowing?) and density of the flow angle histogram (how much flow is there?)
To obtain a classifier that can predict the effect that an action will generate in a given context, we discretize the effect values and train multi-class support vector machines using the discrete values as target values.
Junior’s Affordance Learning