Why We Are Doing This
The primary motivation for working on this project was to attempt a project that no member of the team had done before. Neither of the members had any robot construction experience, and little sensor work. By building this robot, the team hoped to gain valuable experience that can be brought to other projects and designs.
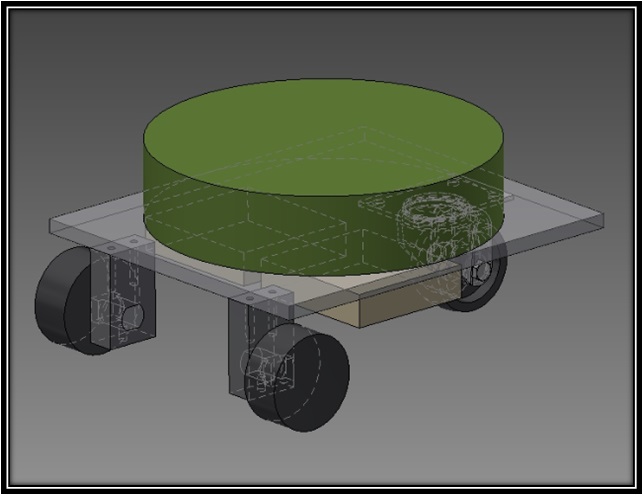
1. The Robot
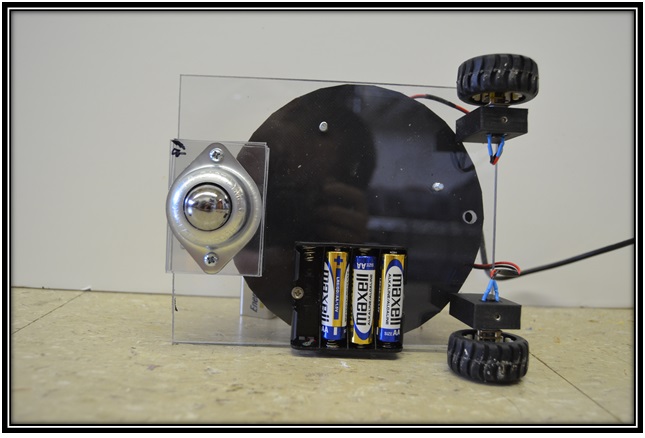
The robot has two with a DC motor attached and one metal roller in the back, enabling free movement.
The body of the robot was designed to be flexible so the implementation can be tailored to whatever job was required.

Click the picture for more details!
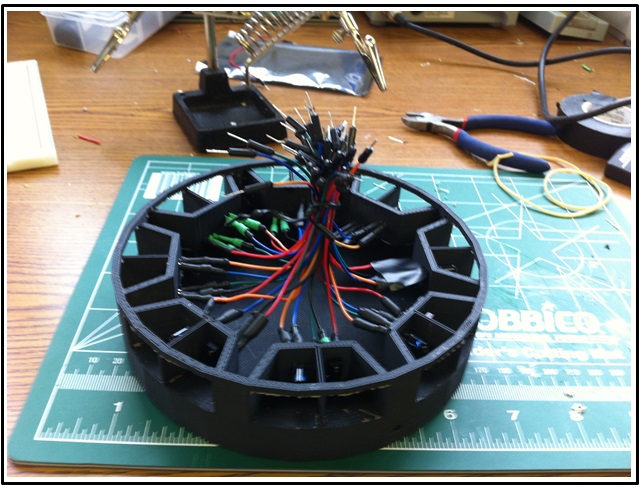
2. The Sensors
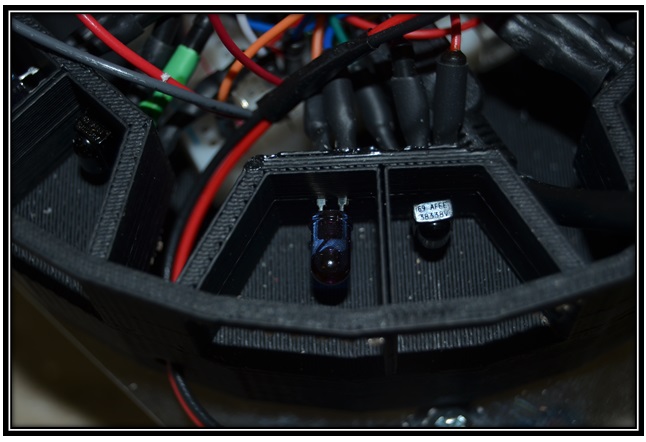
The sensing aspect is made of eight infrared LED distance sensor, hand made. An infrared LED sends out an infrared wave with a frequency of 38,000 hz (the specifications of the LED receiver used).
The sensors pick up an object on level with the sensing aparatus at a radius of one foot.

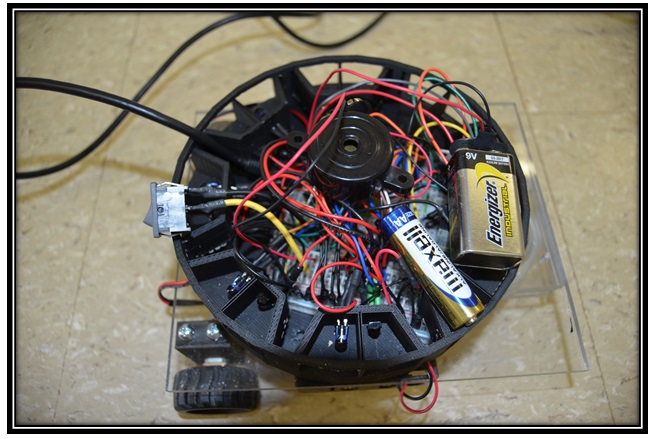
Putting It All Together
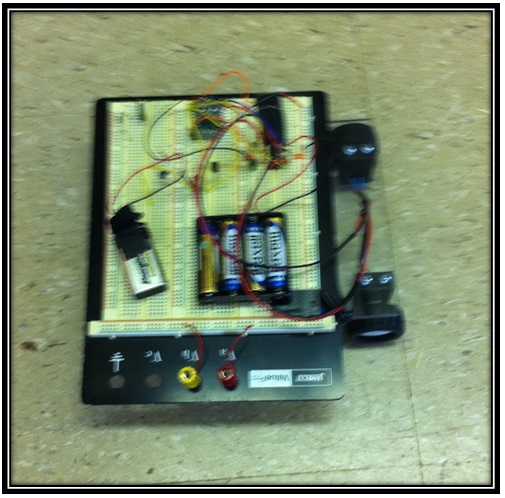
When an object is detected in the range, a signal is sent to a microcontroller and a loud beeping noise is emitted. The microcontroller will determine which direction
the robot should move so to avoid the object in range. It will continue moving until no object is within it's sensor range (of about one foot). In this way, the robot
quickly reacts to incoming objects or avoids stationary ones.