Don't Use Standard Resistors to Control the Current for the Infrared LEDs
When dealing with high current systems (like in the sensor tower) there are far too many watts going through a resistor for a standard resistor to handle. A current regulator will give you much better results.
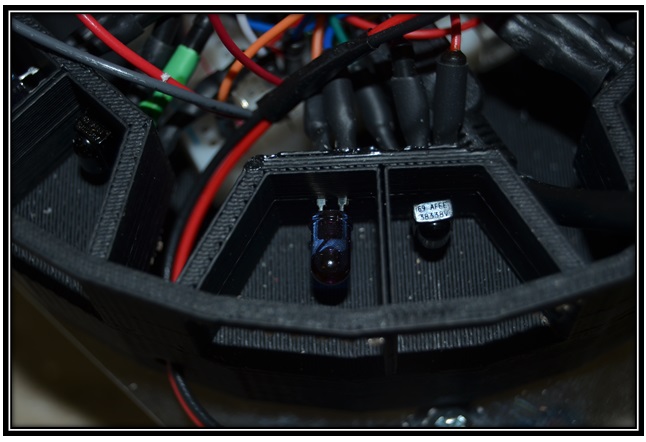
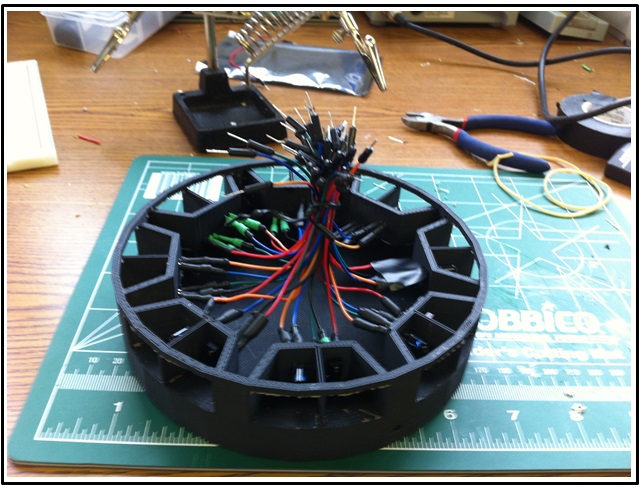
Make the Sensor Tower Divisions Thicker
In our current model there is about a milimeter of wall between the LED and the receiver. At high current values necessary to get good range, the receiver can detect through the wall. Adding aluminum foil might also help.
Turn Individual LEDs On and Off to Get More Range
An Infrared LED can take about 100mA constantly and be safe, but can take a full 1A for short amounts of time and be fine. More current means more range. By turning individual LEDs off and on, but pumping much more current through it, you will get significantly more range. This will require you to rewire the circuit such that the LEDs are in parallel.
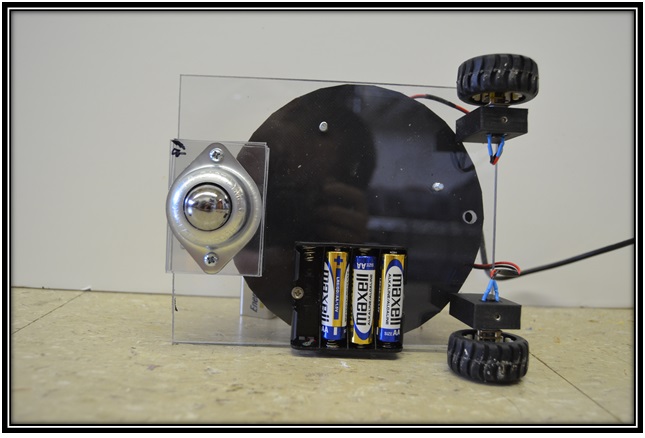
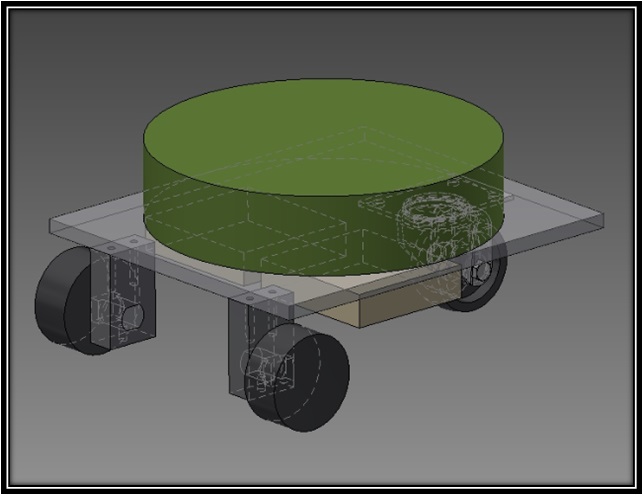
Beware of Casters Using the Three Wheel Design
Due to the three wheeled design you have to be careful when choosing the caster for the back wheel. Initial testing with a standard caster failed due to the light weight design of the platform. The caster had the tendency to not track to the center even with both wheels running forward. This resulted in the entire robot pulling to the left or right depending on which direction the caster was. To overcome this problem we changed the rear caster to a ball trandfer which will have no tendancy to go one way or the other.
Get Faster Motors
When choosing the motors don't assume that a very high rpm is going to result in speed. In our case the motors were geared down a decent amount. This does result in a good amount of torque, but also a slower speed. Finding something with a better balance would probably be advised.